Mit seinem Smart Charging Interface stellt dSPACE Automobilherstellern und Anbietern von Ladesäulen eine Komplettlösung für die Entwicklung und den Test von Technologien für das intelligente Laden zur Verfügung. Die Lösung berücksichtigt sowohl internationale als auch nationale Standards und garantiert Interoperabilität.
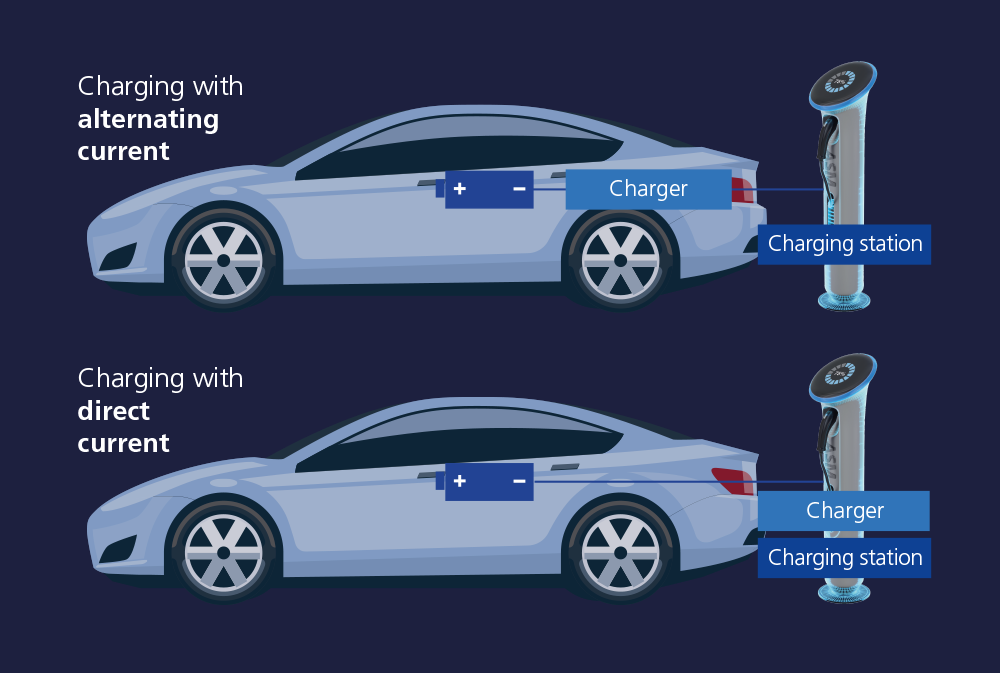
Bei der Entwicklung neuer Ladetechnologien für Elektrofahrzeuge steht die Ladegeschwindigkeit im Vordergrund. Beim Laden von Fahrzeugen mit Wechselstrom ist die Ladeleistung aufgrund der im Fahrzeug eingebauten AC/DC-Wandler relativ gering. Wird jedoch Gleichstrom für den Ladevorgang verwendet, ist der Wandler in eine externe Ladestation integriert. Diese externen Systeme sind weder von der Größe noch vom Gewicht her begrenzt. Daher können sie eine wesentlich höhere Ladegeschwindigkeit erreichen. Um jedoch einen optimalen und sicheren Ladevorgang für die Batterie zu gewährleisten, ist ein umfangreicher Informationsaustausch erforderlich.
Internationale Normen ebnen den Weg für neue Möglichkeiten
Normen wie die internationale ISO 15118, die japanische CHAdeMO oder die chinesische GB/T 27930 eröffnen neue Möglichkeiten für eine intelligente Ladesteuerung und zukünftige Abrechnungsverfahren. Sie schaffen die Voraussetzungen für die Interoperabilität und sind die Grundlage für die Entwicklung intelligenter Ladestrategien. So kann beispielsweise die Ladegeschwindigkeit in Abhängigkeit von der verfügbaren Energie, der Leitungskapazität oder dem Energiebedarf der Nutzer gesteuert werden.
Vermeiden von Netzüberlastungen
Herkömmliche AC-Ladesysteme führen nur sehr einfache Tests durch, bevor sie den Ladevorgang starten. Sie bestimmen beispielsweise den maximalen Ladestrom in Abhängigkeit von der Stromgrenze der Ladestation und der tatsächlichen Stromkapazität des Ladekabels des Fahrzeugs. Doch mit dem Schnellladen sind die Zeiten der ungeregelten Ladevorgänge vorbei. Während des Ladevorgangs, der mit Gleichstrom nach ISO 15118 und DIN SPEC 70121 arbeitet, überlagert eine hochfrequente High-Level-Kommunikation die bestehende Low-Level-PWM-Kommunikation des Steuer-Pilot-Pins. Das Fahrzeug nutzt Powerline-Kommunikation (PLC) nach dem Standard HomePlug Green Phy und stellt eine verschlüsselte Kommunikation mit der Ladestation her.
Der SLAC-Mechanismus (Signal Level Attenuation Characterization) gewährleistet den korrekten Verbindungsaufbau. Er verhindert, dass das Fahrzeug aufgrund des Übersprechens der Hochpegelsignale eine Verbindung mit einer benachbarten Ladestation herstellen kann. Beim induktiven Laden wird die Kommunikation über WLAN ausgetauscht. Vereinfacht gesagt, werden Informationen wie Preise, Ladeprofile oder Statusinformationen ausgetauscht, bevor der Ladevorgang beginnt. Während des Ladevorgangs werden kontinuierlich Informationen über den Ladezustand und den Energieverbrauch übermittelt.
Am Ende des Ladevorgangs wird die Steckersperre gelöst und die verschlüsselten Abrechnungsdaten werden an den Betreiber der Ladestation gesendet. Neben der Kommunikation zwischen Fahrzeug und Ladestation bietet die Norm ISO 15118 eine ideale Grundlage für eine intelligente Netzsteuerung, mit der Netzüberlastungen vermieden werden können. Ladetechnologien, die mit den CAN-basierten Standards CHAdeMO und GB/T arbeiten, bieten im Allgemeinen ähnliche Funktionen für die Ladekommunikation wie ISO 15118.
Einfache Integration: Das neue DS5366 Smart Charging Interface
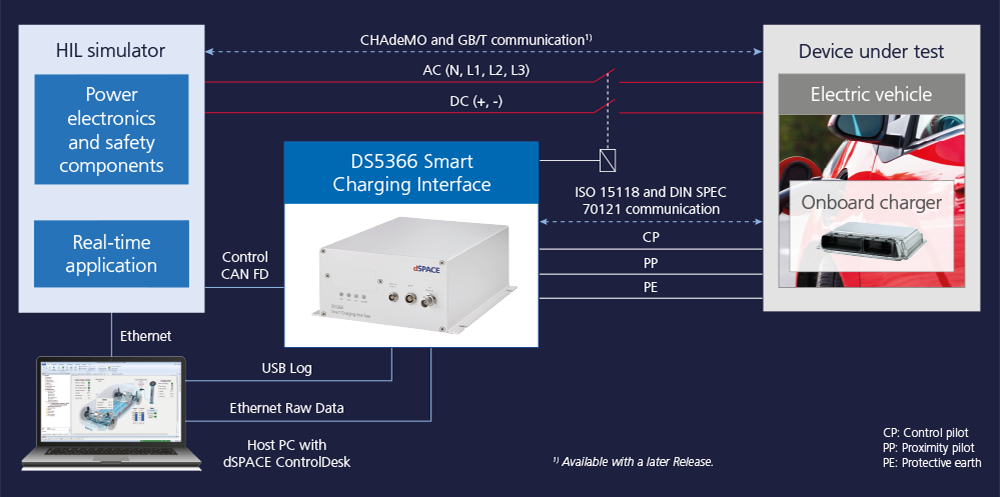
Das neue dSPACE DS5366 Smart Charging Interface unterstützt Entwickler von Onboard-Ladegeräten, Ladestationen und zukünftig auch von induktiven Ladesystemen mit einer umfassenden Palette an Testoptionen und dynamischen Modellen. Zentrale Anforderungen bei der Entwicklung des DS5366 Smart Charging Interface waren eine einfache Integration in bestehende Testsysteme und eine Testtiefe, die je nach Kundenwunsch flexibel angepasst werden kann. Manipulationen sind sowohl auf der elektrischen als auch auf der Protokollebene möglich.
Eine umfassende Protokollierung aller Kommunikationsereignisse ermöglicht die manuelle oder automatische Überprüfung des beabsichtigten Verhaltens und der Einhaltung der Protokollspezifikation sowie die Durchführung einer Fehlerdiagnose. Typische Anwendungen sind Tests der Onboard-Ladegeräte und Ladestationen, insbesondere der Kommunikationsmodule nach verschiedenen Ladestandards.
Eine weitere wichtige Anwendung ist die Fehlersimulation bei der Kommunikation. Das dSPACE DS5366 Smart Charging Interface hilft, eine Vielzahl von Ladestationen im Labor zu simulieren und stellt sicher, dass das Steuergerät fehlerfrei funktioniert.
Typische Anwendungen für das DS5366 Smart Charging Interface
Typische Anwendungen für das DS5366 Smart Charging Interface sind Tests der Onboard-Ladegeräte und Ladestationen, insbesondere der Kommunikationsmodule nach verschiedenen Ladestandards. Eine weitere wichtige Anwendung ist die Fehlersimulation bei der Kommunikation.
Andere Anwendungsgebiete: Entwicklung Onboard-Ladegeräts
Ebenso wird es möglich sein, die Kompatibilität zwischen den entwickelten Ladestationen und zahlreichen simulierten Fahrzeugen bei Tests an der Ladestation zu testen. Ein weiterer Schwerpunkt ist die Entwicklung von Onboard-Ladegeräten. Wenn während der Entwicklung eines Fahrzeugladereglers keine Software oder Hardware für die Ladekommunikation zur Verfügung steht, kann die dSPACE Lösung die Fahrzeugsteuergeräte oder deren Kommunikationscontroller für Tests in Fahrzeugprototypen ersetzen.

Eine schlüsselfertige Testumgebung mit der ASM Toolsuite
ASM, die dSPACE Toolsuite für die Simulation von Motoren, Fahrdynamik, elektrischen Komponenten und der Verkehrsumgebung, bietet eine schlüsselfertige Anwendung für batteriebetriebene Elektrofahrzeuge, einschließlich Echtzeit-Hochvoltbatteriesimulation. Die Modelle enthalten auch eine Ladestationsemulation, bei der die Ladespannung von der Leistungsaufnahme des Fahrzeugs abhängt, die von dem im Fahrzeug getesteten Ladesteuergerät bestimmt wird. Wenn kein Laderegler verfügbar ist, kann der Benutzer mit ASM einen Regler simulieren, der einen Ladeprozess mit konstantem Strom und konstanter Spannung (CCCV) verwendet.
Die Demomodelle sind so vorbereitet, dass alle für die Kommunikation mit den Steuergeräten erforderlichen Signale zur Verfügung stehen. Damit ist es möglich, die Regelalgorithmen und Schnittstellen zwischen allen Geräten nach Standards wie CHAdeMO, ISO 15118 und GB/T 20234.2 zu testen.
