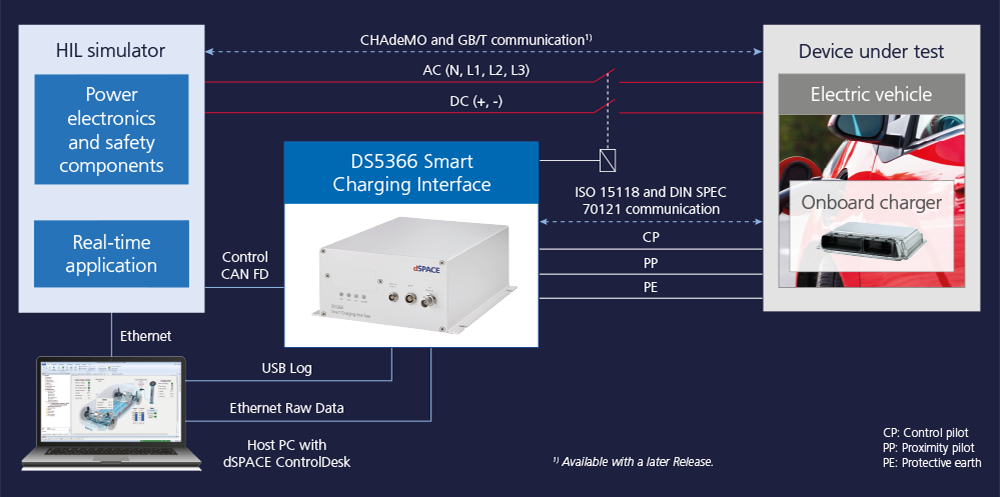
The DS5366 Smart Charging Interface from dSPACE provides automobile manufacturers and providers of charging stations with a complete solution for developing and testing technologies for smart charging. The solution takes into account both international and national standards and ensures interoperability.
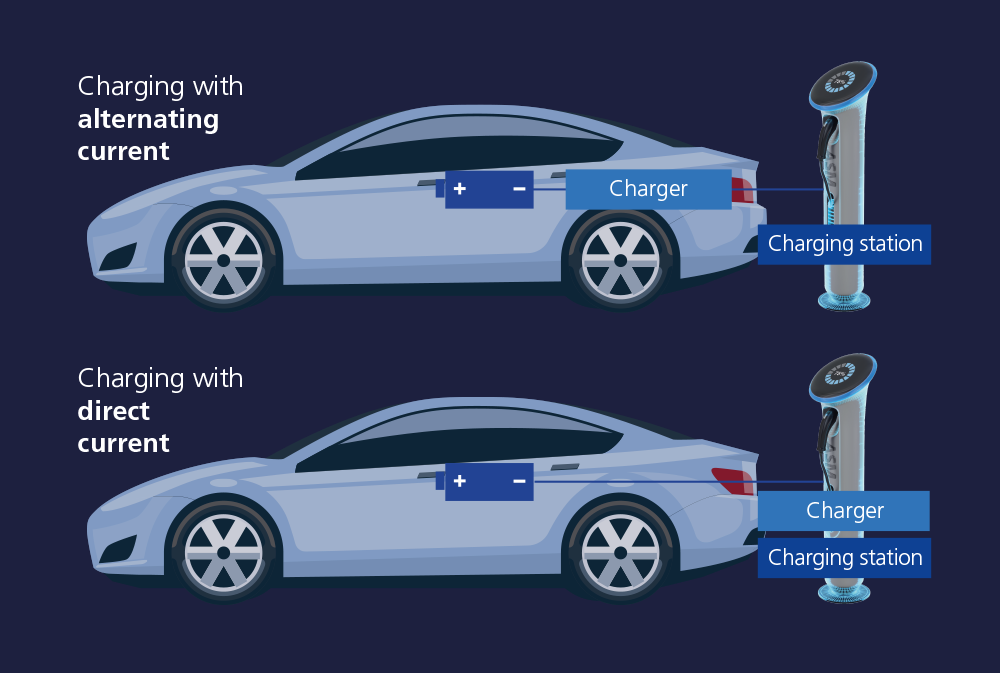
When developing new charging technologies for electric vehicles, charging speed is a top concern. The charge rate is relatively low when charging vehicles with alternating current due to the AC/DC converters installed in the vehicle. However, if direct current is used for the charging process, the converter is integrated in an external charging station. These external systems are limited neither in size nor weight. Therefore, they can achieve a significantly higher charge rate. Yet, to ensure an ideal and safe charging process for the battery, there must be an extensive exchange of information.
International Standards Pave the Way for New Possibilities
Standards such as the international ISO 15118, the Japanese CHAdeMO, or the Chinese GB/T 27930 open up new possibilities for smart charging control and future billing procedures. They set the prerequisites for interoperability and are the basis for developing smart charging strategies. For example, the charge rate can be controlled depending on the available energy, the line capacity, or the energy requirements by the users.
Avoiding Network Overloads
Conventional AC charging systems perform only very simple checks before they start the charging process. For example, they determine the maximum charging current depending on the current limit of the charging station and the actual current capacity of the vehicle’s charging cable. However, with rapid charging, the days of unregulated charging processes are over. During the charging process that uses direct current according to ISO 15118 and DIN SPEC 70121, high-frequency high-level communication is superimposed on the existing low-level PWM communication of the control pilot pin. The vehicle uses power-line communication (PLC) according to the HomePlug Green Phy standard and establishes encrypted communication with the charging station.
The Signal Level Attenuation Characterization (SLAC) mechanism ensures the correct connection setup. It prevents the vehicle from establishing a connection with an adjacent charging station due to crosstalk of the high-level signals. With inductive charging, communication is exchanged via WLAN. To put it simply, information, such as prices, charging profiles, or status information is exchanged before the charging process starts. During the charging process, information about the state of charge and energy consumption is continuously transmitted.
At the end of the charging process, the connector lock is released and the encrypted billing data is sent to the charging station operator. In addition to communication between the vehicle and the charging station, the ISO 15118 standard provides an ideal basis for intelligent network control that can avoid network overloads. Charging technologies that work with the CAN-based standards CHAdeMO and GB/T generally provide similar functions for charging communication as ISO 15118.
Simple Integration: The New DS5366 Smart Charging Interface
The new dSPACE DS5366 Smart Charging Interface supports developers of onboard chargers, charging stations, and, in the future, inductive charging systems with a comprehensive range of test options and dynamic models. The central requirements while developing the DS5366 Smart Charging Interface were an easy integration of existing test systems and a test depth that can be flexibly adjusted depending on customer requirements. Manipulations are possible both at the electrical and at the protocol level.
Comprehensive logging of all communication events allows for manual or automatic checks of the intended behavior and compliance with the protocol specification as well as performing an error diagnosis. Typical applications are tests of the onboard chargers and charging stations, particularly the communication modules according to various charging standards.
Another important application is error simulation during communication. The dSPACE DS5366 Smart Charging Interface helps simulate a wide variety of charging stations in the lab and ensures that the ECU functions without errors.
Typical applications for the DS5366 Smart Charging Interface
Typical applications for the DS5366 Smart Charging Interface are tests of the onboard chargers and charging stations, particularly the communication modules according to various charging standards. Another important application is error simulation during communication.
Other Application Areas: Developing Onboard Chargers
In the same manner, it will also be possible to test the compatibility between the developed charging stations and numerous simulated vehicles during tests on the charging station. Another focus area is the development of onboard chargers. If no software or hardware is available for charging communication during the development of a vehicle charge controller, the dSPACE solution can replace the vehicle ECUs or their communication controllers for testing in vehicle prototypes.

A Turn-Key Test Environment with the ASM Tool Suite
ASM, the dSPACE tool suite for simulating motors, vehicle dynamics, electric components, and the traffic environment, offers a turn-key application for battery-powered electric vehicles, including real-time high-voltage battery simulation. The models also include a charging station emulation in which the charging voltage depends on the vehicle power consumption, which is determined by the charging control unit that is tested in the vehicle. If no charge controller is available, ASM lets users simulate a controller using a constant current constant voltage (CCCV) charging process.
The demo models are prepared in such a way that all signals required for communication with the control units are available. This enables testing of the control algorithms and the interfaces between all devices according to standards such as CHAdeMO, ISO 15118, and GB/T 20234.2.
