RTI CAN Blockset
For combining dSPACE systems with CAN communication networks
The RTI CAN Blockset is especially suited for developing and testing control functions that communicate via a CAN bus system.
-
Development and test of control functions that communicate via CAN bus
-
Database file import and CAN raw data access
-
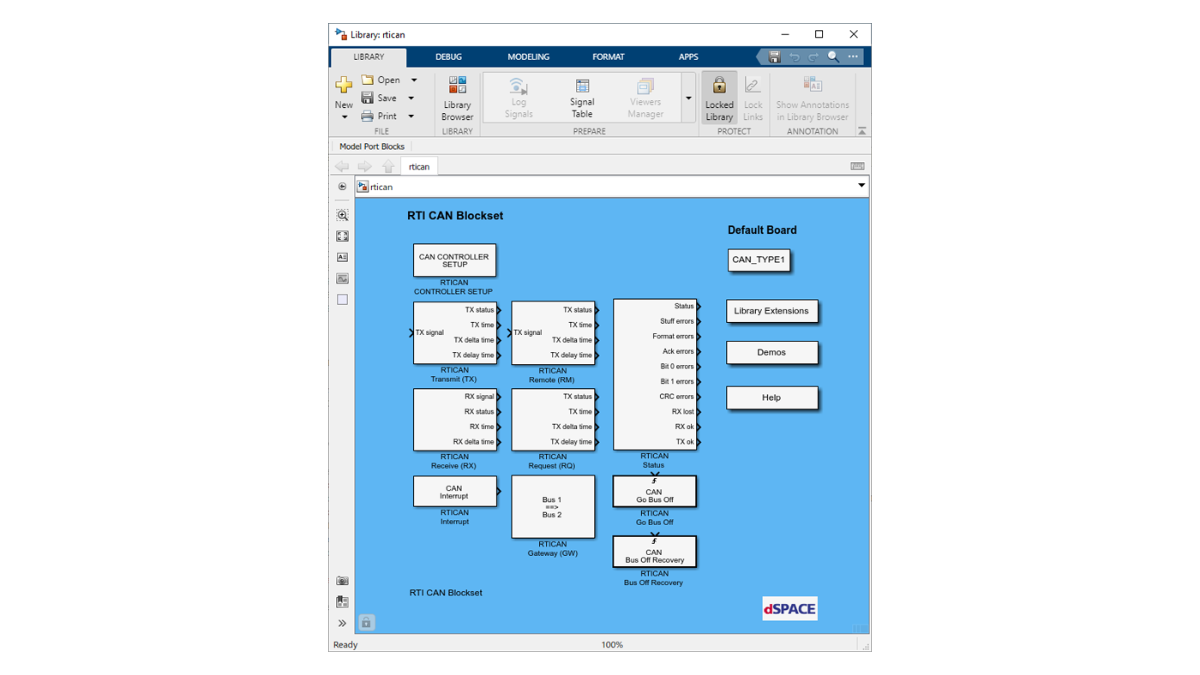
One Simulink® block for each functionality and each message

Application Areas
The RTI CAN Blockset is an extension for Real-Time Interface and can be used for combining dSPACE systems with CAN communication networks and for configuring these CAN networks. The RTI CAN Blockset and the RTI CAN MultiMessage Blockset differ with regard to their features and application areas.
Key Benefits
The RTI CAN Blockset is especially suited for developing and testing control functions that communicate via a CAN bus system. To set up a message with the RTI CAN Blockset, simply choose the appropriate block from the CAN block library and connect it to your Simulink model. Configuration information such as the baud rate, identifier, message length, and interrupts can be entered in dialogs.
| Functionality | Description |
|---|---|
| General |
|
| Initialization and configuration |
|
| Signal and message handling |
|
| Interrupts |
|
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.