先进驾驶辅助系统(ADAS)和自动驾驶(AD)技术市场正在经历高速增长期。驾驶员辅助系统和支持自动驾驶的功能日益复杂,设计和验证电子控制单元原型时,开发人员需要使用详尽、灵活且通用开发方法。在仿真和验证方面,基于模型在环(MIL)、软件在环(SIL)和硬件在环(HIL)的流程经证明相当有效。由于控制系统的复杂性、各种电子控制单元和执行器之间的精确交互,在某些领域,有关质量和安全性的准确陈述只能通过真实的驾驶测试来实现。然而,真实的道路驾驶测试并不完全适合ADAS/AD功能的验证,由于发生碰撞的风险较高,许多测试场景无法在现实中执行。这就需要针对此类情况非常有效、经济,并以安全为导向的全新测试方法。

基于增强现实的测试
需要一种方法兼具真实驾驶测试的真实感、集成深度和HIL方法的灵活性、近乎无限的可能性,即真实世界与虚拟世界相结合。这种结合通常称为增强现实或混合现实,特别是在视觉感知方面。感知也在ADAS/AD功能的测试中发挥着至关重要的作用。这些功能接收来自雷达、激光雷达和摄像头传感器的信号,因此,利用传感器来实施扩展测试选项是行得通的。该方法意味着传感器收集虚拟世界的信息,并利用这些信息来控制和驾驶实车。这样,工程师就可以让一辆车在现实世界中高速行驶,与此同时,在虚拟世界中让一个孩子冲到街上。ADAS/AD功能分析以虚拟方式捕捉的对象,随后在实车中触发适当的动作。现代摩比斯公司采用了该方法,并与dSPACE 和韩国的dSPACE经销商Hancom MDS Inc. 的专家合作,实施了该方法。
创建测试环境
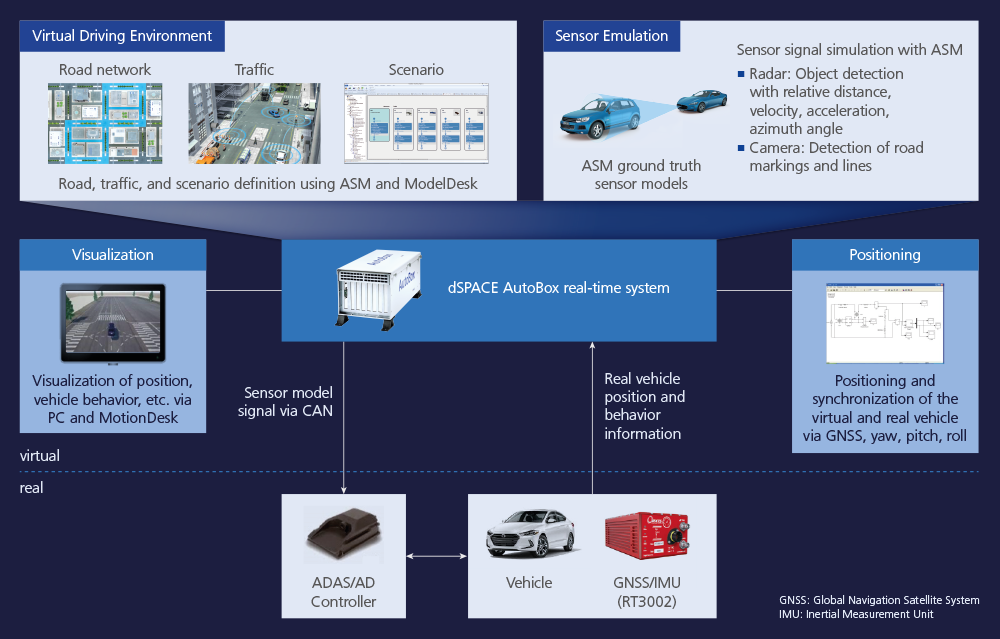
测试设备包括一个dSPACE AutoBox实时系统,安装在被测试车辆的后备箱中。在实时系统上执行复杂的仿真,其中包括车辆、行人、交通标志、路面标志、路旁周边和建筑物等。将这个虚拟世界而非真实的传感器数据作为ADAS/AD控制单元的输入。这通过自主车辆来实现,自主车辆基本上是真实测试车辆的数字克隆,在虚拟世界中穿梭。自主车辆和测试车辆配备相同的传感器。通过Automotive Simulation Models(ASM)工具套件生成仿真。ASM包含传感器模型,这些模型可以用来仿真雷达、激光雷达和摄像头传感器。ASM还可以测试工程师定义环境,其中可以有任意数量的车辆、路口、走向任何方向的行人等,以便实时仿真。仿真通过IMU(惯性测量单元)和GNSS(全球卫星导航系统)与实车同步,这样,多方向动作就可以从现实世界传输到虚拟世界中。这就形成了一个闭环,因此,可以将该测试方法归类为车辆在环(VIL)。


利用VIL测试车辆
VIL测试在现代摩比斯公司瑞山试验场进行,该试验场有充足的无障碍测试空间。驾驶员和副驾驶坐在实车内,AutoBox放在后备箱内。车辆行驶时,副驾驶启动测试场景,虚拟传感器数据从该场景中输入至真实的传感器或ADAS/AD控制单元。譬如说,这些场景可以包括障碍物、路口或路上的行人。此类场景无法在现实世界中充分测试,因为发生危险碰撞的风险太高,或者需要分析碰撞涉及的指标(碰撞点、碰撞速度)。测试场景来自标准化测试(如符合EuroNCAP的测试),以及用于验证特殊功能的专用测试。AEB(自主紧急制动系统)和LSS(车道辅助系统)的相关场景用来测试已实施的ADAS解决方案。现代摩比斯公司已经依靠多个dSPACE HIL系统在实验室验证了ADAS,由于dSPACE工具链的一致性,为此开发的测试可以很容易应用于车辆VIL验证。


VIL方法的创新和评估
VIL测试方法兼具真实测试和虚拟测试的优点,用于分析和验证ADAS/AD功能。VIL支持的测试深度和覆盖范围远远超过传统方法,还降低了同类真实测试(使用假人、实车等)的复杂性和成本。此外,VIL测试还可以结合量产控制单元和原型开发单元来进行。对Restbus仿真(可能不会呈现真实的行为)的建模也没有要求,因为测试中包含第三方控制单元的真实行为。比如说,测试高度成熟、真实,不断产生更精确的数据,因为它是真实的延迟,决定着系统行为。此外,MIL、SIL和HIL测试场景的可复用性带来了额外的高效验证方法,该方法无缝、一致地集成到既定的开发过程中。VIL具有简单、精准且可重现测试方法的一切优点。可以说,VIL方法包括特定车辆的行为,增强了HIL众所周知的优点,为ADAS/AD控制单元带来了新的验证选项,极具真实感。
作者简介:

Teaseung Kim
Teaseung Kim is responsible for Autonomous Vehicle Test Development at Hyundai MOBIS in Yongin-Shi, South Korea.

