Les solutions de prototypage rapide SPACE aident les développeurs de fonctions du monde entier à donner vie à leurs idées dans un environnement réel, avec de vrais capteurs et actionneurs, et en temps réel, ce qui réduit considérablement les efforts et les coûts de développement. Un portefeuille flexible et évolutif de matériels et de logiciels supporte la plupart des interfaces automobiles, y compris les normes de bus et de réseau, les interfaces de capteurs et d'autres options d'extension comme les FPGA ou les GPU pour les applications ADAS/AD, moteur ou d'électromobilité.
Avantages majeurs
- Chaîne d’outils de bout en bout pour le prototypage rapide (RCP) et le développement orienté données
- Test et validation de nouvelles fonctionnalités dans des environnements réels avec des capteurs et des actionneurs réels
- Solutions hautes performances et évolutives allant du prototypage sur les calculateurs de série aux systèmes compacts ou modulaires, qui peuvent être adaptées en fonction de l'évolution des exigences des projets.
- Interfaces d'E/S prêtes à l'emploi et interfaces de bus et de réseau avec des fonctionnalités étendues sans programmation manuelle.
- Prise en charge d’accélérateurs matériels tels que GPU ou FPGA pour exécuter des fonctionnalités d’intelligence artificielle (IA), par exemple pour la perception ou la fusion de capteurs, ou pour l'exécution d'algorithmes de commande rapide dans la gamme µs.
- Mécanismes de contrôle de sécurité fonctionnelle dédiés pour permettre des roulages réels

Aperçu des solutions
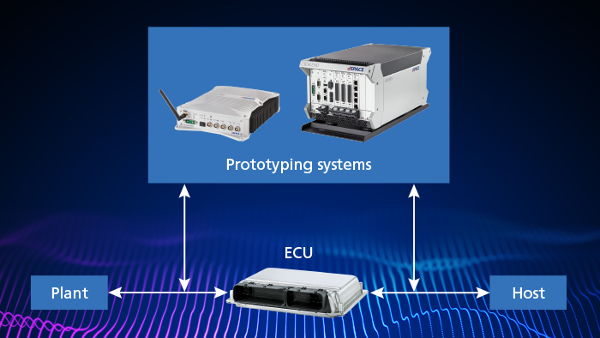
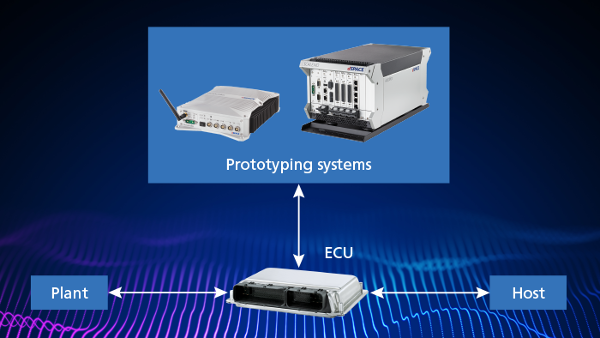
Les solutions de prototypage rapide dSPACE répondent aux exigences de la conception de contrôleurs mécatroniques et du développement orienté données dans tous les domaines de l'automobile et dans d'autres secteurs, comme l'aéronautique ou la robotique. Nos solutions de prototypage rapide vous permettent de tester vos nouvelles fonctionnalités dans des environnements réels et de les améliorer et de les calibrer sur place.
Choisissez un système dSPACE adapté à vos besoins, qu'il s'agisse d'interfaces calculateur, qui permettent le prototypage sur cible sur des calculateurs série, de systèmes compacts comme la MicroAutoBox ou la MicroLabBox, ou de systèmes modulaires haut de gamme comme SCALEXIO ou AUTERA. Pour configurer les systèmes, vous pouvez utiliser les outils logiciels dSPACE ConfigurationDesk, ControlDesk et le Bus Manager en combinaison avec des outils couramment utilisés tels que MATLAB®/Simulink® de MathWorks, des modèles basés sur le standard FMI ou des frameworks basés sur Linux tels que RTMaps ou Robot Operating System (ROS).