需要多少个环境传感器?
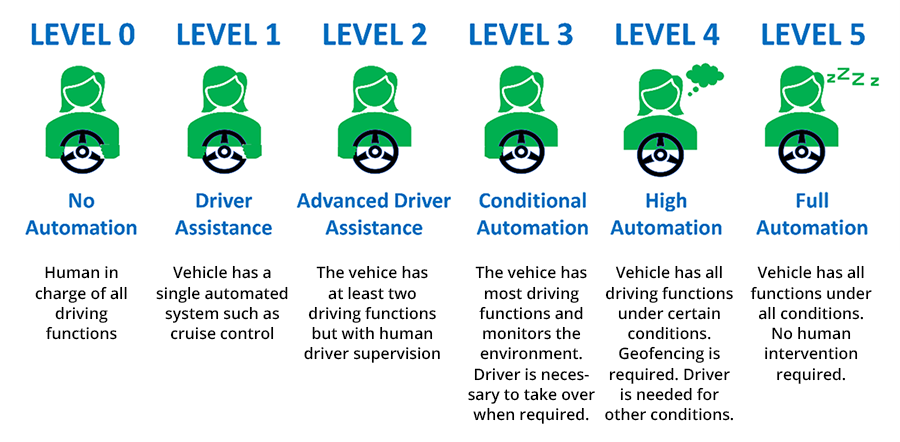
在接下来的几年里,汽车、农业、采矿和其他自动驾驶汽车行业的公司将加速他们的行动,以达到自动驾驶等级 3 和等级 4。为了达到上述自动驾驶等级,必须显著增加感知传感器的数量。需要多少个环境传感器才能达到自动驾驶等级 3 和 4,以及面临的新挑战有哪些?总的说来,利益相关者是时候该回答这一问题了。”
不要低估开发多传感器应用所面临的挑战
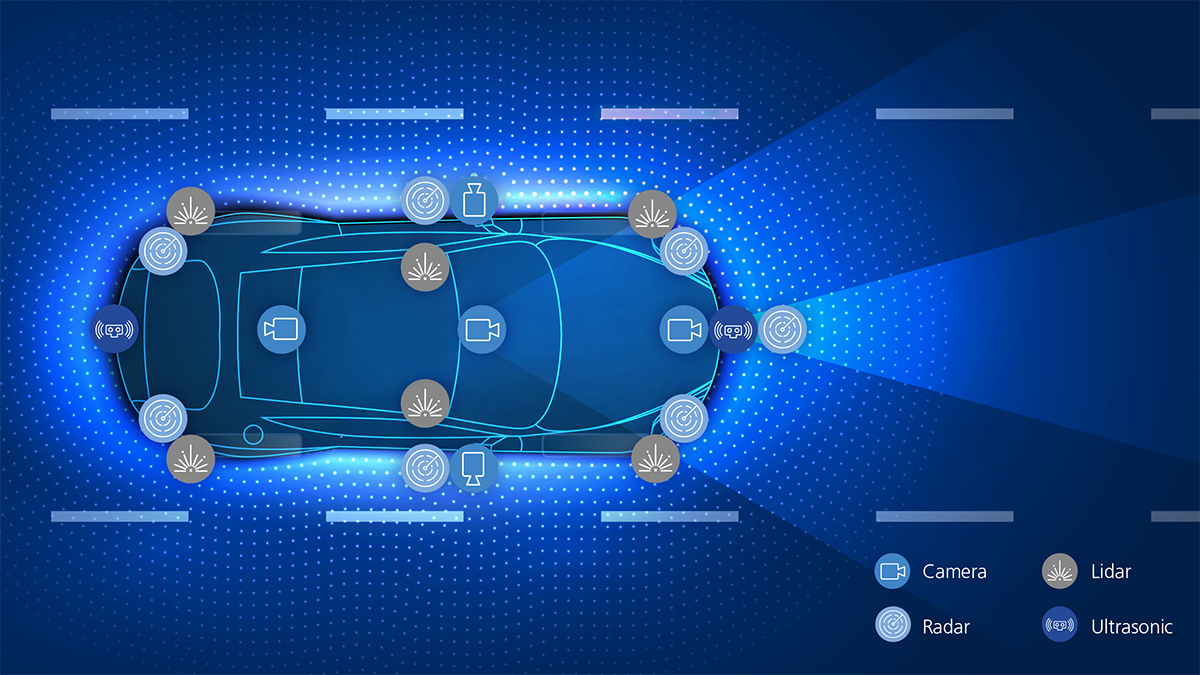
制造商(原始设备制造商)已经为其车辆配备了实现未来高度自动化所需的必要硬件。他们估计,需要 20-30 个传感器才能实现这一目标。这意味着车辆将越来越多地配备多摄像头、雷达、激光雷达、音频、超声波、GPS/GNSS 和其他环境传感器。这些传感器具有不同的采样率、数据接口和数据格式。此外,各种部门、团队、合作伙伴和专家都参与开发复杂软件 (SW) 功能。因此,不应低估开发用于车辆的多传感器应用所面临的挑战。
ADAS/AD 应用开发的要求
传感器和 I/O 设备的接口
ADAS/AD 开发人员必须为传感器和总线开发接口,以便使用下游组件可采用的格式从这些来源访问数据。工程师和开发人员必须为原始和高带宽数据采集、数据处理、数据同步和数据融合开发高效和多功能工具。
快速原型开发和生产实施
如果不能在生产环境中部署,那么优秀的原型又有何用?这种情况困扰着许多 ADAS/AD 软件开发团队。许多工程师使用 Robot Operating System (ROS) 等开源软件 (OSS)。这些工具缺乏对功能安全标准的支持,例如汽车 ISO 26262、农业 ISO 25119、土方工程设备 ISO 219014-1 等标准。此外,对 CAN、CANFD、以太网等标准也没有坚实的保障。
协作
跨团队以及与合作伙伴之间的协作是开发最先进应用的一个重要要素。对于项目团队可能位于不同地理位置的跨国公司而言,这一要求更为重要。不同合作伙伴、团队和专家之间的协作需要一个易于使用的软件开发框架。理想情况下,该框架应提供知识产权 (IP) 保护,允许与合作伙伴共同开发而无 IP 暴露风险。此外,平台还应该支持 Python 和 Simulink 等不同的编程语言。
重复使用代码/算法
ADAS/AD 算法的开发是一项需要大量资源的工作。说到底,重要的是开发的代码/算法可以在其他项目和将来重复使用。此外,可靠的应用需要统一的代码模板和编码指引,以提高 SW 功能的可维护性。当使用来自不同开发人员的 OSS 时,实现这个目标可能会很困难。基于组件的编程允许以稳定的方式重复使用组件,从而使重复使用代码和共享变得容易。
易于调试应用程序
ADAS/AD 项目非常复杂,需要多个应用程序才能成功实施。然而,速度至关重要,将应用快速推向市场非常重要。实质上,快速调试应用的能力非常重要。它可以缩短开发、测试和部署应用所需的时间。

从原型开发到生产
由于将应用部署到生产环境中存在挑战,因此开发功能性 ADAS/AD 应用的过程变得缓慢。ROS 等许多现有的解决方案还无法用于生产。高延迟、非确定性行为和缺乏功能安全支持是使用 OSS 时遇到的一些主要障碍。RTMaps 可随时用于生产,允许用户在 Linux 或 Windows 上开发应用程序,并将这些应用程序部署到 RTOS(例如 QNX)上。它还允许对RTMaps运行在 X86 和基于 ARM 的设备的情况下进行硬件抽象。

降低软件开发复杂性
虽然可以在 RTMaps 中编写脚本,但基于组件的开发能力对于降低软件开发的复杂性至关重要。基于组件的开发简化了应用调试、测试和团队内部的协作。此外,它能够进行更容易的需求定义,并通过使应用接受不同的输入来测试其行为,从而降低测试的复杂性。
ISO 26262 认证
对于汽车行业中的安全关键型应用,必须进行认证。对于汽车行业,必须符合 ISO26262 标准。虽然必须对自动驾驶车辆的整个框架进行认证,但重要的是中间件已通过认证,从而能减少获得认证所需的资源和工作量。随着 RTMaps 即将获得 ISO26262 ASIL-B 认证,用户可以在 QNX 和嵌入式 Linux 等不同的 RTOS 中安全执行多核功能、以零拷贝的方式处理数据、从 dSPACE 产品级代码生成器 TargetLink 生成 RTMaps 组件并监控不同组件的延迟。
600+ 传感器和 I/O 组件
一个平台拥有许多组件允许连接各种传感器(例如激光雷达、雷达)、基于摄像头的总线(例如 CAN、CANFD、以太网)的组件,无疑是非常具有价值的。在许多情况下,ROS 等 OSS 将拥有由社区开发的节点或接口。特别是对于软件原型开发,RTMaps 为 ROS 提供了一个随时可用的接口,允许轻松连接两个应用。然而,使用 OSS 进行生产开发通常需要投入大量的资源来验证和维护这些组件。RTMaps 拥有超过 600 个专业开发和持续维护的开箱即用型组件。此外,RTMaps AI 商店还允许用户访问由合作伙伴开发的最先进的人工智能模型。
实质上,RTMaps 是加速 ADAS/AD 应用开发的理想平台,能够以较低的总成本更快将其推向市场。