ASM Drivetrain Basic
Real-time simulation model of a dual clutch transmission
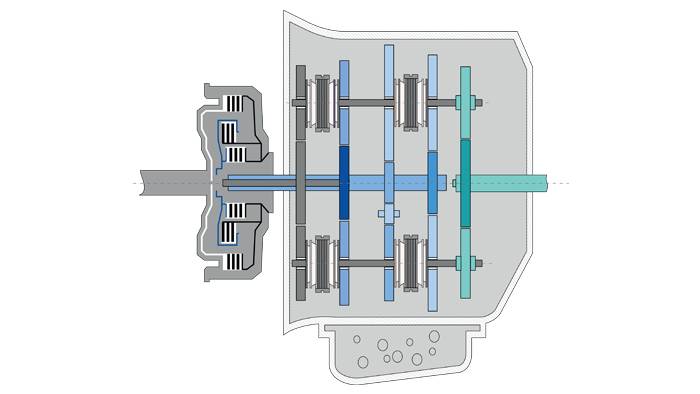
The ASM Drivetrain Basic model simulates the mechanics and hydraulics of a dual clutch transmission with physical precision. It can be used to represent the longitudinal dynamic behavior of a vehicle with different transmission configurations.
- Open MATLAB®/Simulink® model
- For ECU testing and function development
- Intuitive graphical parameterization in ModelDesk


The tool is suitable to be used in safety-related development projects according to ISO 26262:2018 for any automotive safety integrity level (ASIL).



Application Areas
- Test of dual clutch transmission control units
- Longitudinal vehicle simulation (e.g., for testing powertrain control units)
Dual Clutch Transmission Tests
Testing dual clutch transmission (DCT) control systems requires a sophisticated simulation of the coupled mechanical and hydraulic parts. Depending on the shaft speeds of the DCT gearbox, the control unit requests a preselection of the most probable gear by actuating hydraulic valves that create a movement of mechanically synchronized elements. As soon as the shaft speeds reach an adequate range, the next gear is engaged and the control unit smoothly moves from one output shaft to the other by actuating both clutches.
Model Implementation
In order to provide a real-time-capable model that can be used for DCT systems of different topologies, a general approach was implemented, which lets you parameterize the system (e.g., gear distribution on the output shaft) or adapt the system directly in the open Simulink model. A soft ECU is provided with the dynamic simulation model to control the DCT system without the real controller. As soon as a real ECU is available, the actuator loops can be switched from the virtual to the real controller.
Components and Characteristics
- Ready-to-use physical demo model for dual clutch transmission systems
- Soft ECU for automatic transmissions, including conventional systems, automated manual transmission systems as well as dual clutch transmission systems
- Map-based combustion engine simulation with fuel consumption estimation
- Empirical simulation of conventional transmission systems
- Physical simulation of mechanics and hydraulics of a dual clutch transmission system (also applicable for automated manual transmission systems)
- Longitudinal vehicle dynamics simulation
- Simulation of longitudinal driver behavior for realistic pedal actuation, including preview capability and physical driver limits
- Flexible gear actuation for various stimulus and reference signal scenarios
- Simulation of vehicle start button control systems
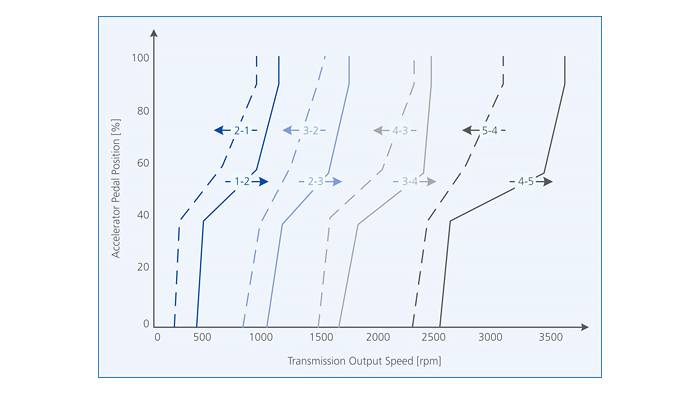
Longitudinal Driving Characteristics
Longitudinal driving simulation is commonly used in test scenarios of powertrain control units to follow a given reference velocity. The vehicle resistances, such as slope and aerodynamics as well as the driver capabilities, such as pedal actuation and gear shifting, have to be modeled. Depending on whether the vehicle velocity is defined as a reference signal or the gears and/or pedal positions are provided as stimulus signals, there are several use cases for the driver that have to be taken into account for simulation. Each operation mode has to be simulated as realistically as possible to also account for efficiency analysis and test bench applications like engine- or drivetrain-in-the-loop scenarios. Preview capabilities on the required vehicle speed improve the velocity tracking performance. Furthermore, situations such as engine startup/stall, gear skipping (e.g., truck applications), and adaptable clutch actuating behavior during gear shifting are only some examples of a highly flexible longitudinal driver implementation.
-
- Afficher en ligne
- Téléchargement
- Ventes Notre équipe d’ingénieurs d’affaires vous assistera dans le choix de votre système dSPACE. Ils vous fourniront également les tarifs et toutes les informations souhaitées concernant d’autres produits dSPACE.
- Achat de logiciels dSPACE Informations sur le téléchargement, l’installation et le système de licence des logiciels dSPACE
Faire avancer l'innovation. Toujours à la pointe de l'évolution technologique.
S’abonner à nos newsletters, gérer ses abonnements ou se désabonner. La newsletter mensuelle contenant toutes les informations liées à l’aéronautique et défense.