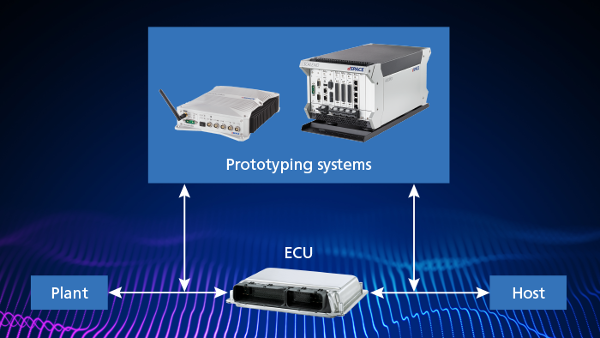
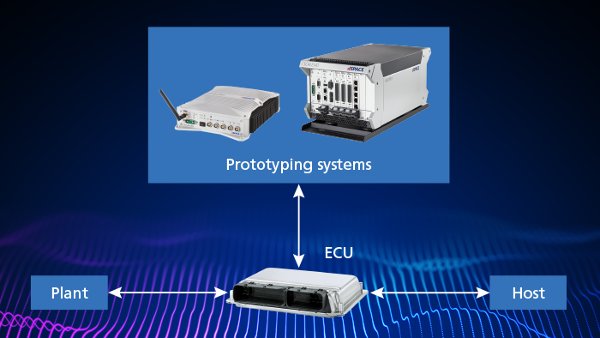
dSPACE rapid prototyping systems help function developers worldwide bring ideas to life in a real environment, with real sensors and actuators, and in real time, significantly reducing development effort and costs. A scalable and flexible portfolio of hardware and software supports most automotive interfaces, including bus and network standards, sensor interfaces, and further extension options like FPGAs or GPUs for ADAS/AD, engine, or electromobility applications.
Key Benefits
- End-to-end tool chain for rapid control prototyping (RCP) and data-driven development
- Testing and validating new functionalities in real environments with real sensors and actuators
- High-performance, future-proof solutions from prototyping on series production ECUs to compact or modular systems, which can be adapted to changing project requirements.
- Ready-to-use I/O interfaces and bus and network interfaces with broad functionality without manual programming.
- Support of hardware accelerators such as GPUs or FPGAs to execute artificial intelligence (AI) features, e.g., for perception or sensor fusion, or to execute fast control algorithms in the µs range.
- Dedicated functional safety monitoring mechanisms to enable real test drives

Solutions at a Glance
dSPACE rapid prototyping systems address the requirements of mechatronic control design as well as data-driven development in all automotive domains and in other industries, such as aerospace or robotics. Our prototyping systems enable you to test your new functionalities in real environments and let you improve and calibrate them on the spot.
Choose a dSPACE system that fits your requirements, from ECU interfaces, which enable on-target prototyping on production ECUs, to compact systems like MicroAutoBox or MicroLabBox, and high-end modular systems such as SCALEXIO or AUTERA. To configure the systems, you can use the dSPACE software tools ConfigurationDesk, ControlDesk, and the Bus Manager in combination with commonly used tools such as MATLAB®/Simulink® from MathWorks, FMI-based models, or Linux-based frameworks such as RTMaps or the Robot Operating System (ROS).