RTMaps Interface Blockset
Ermöglicht Full-Stack-Prototyping über Multisensoranwendungen und harte Echtzeit-Controller
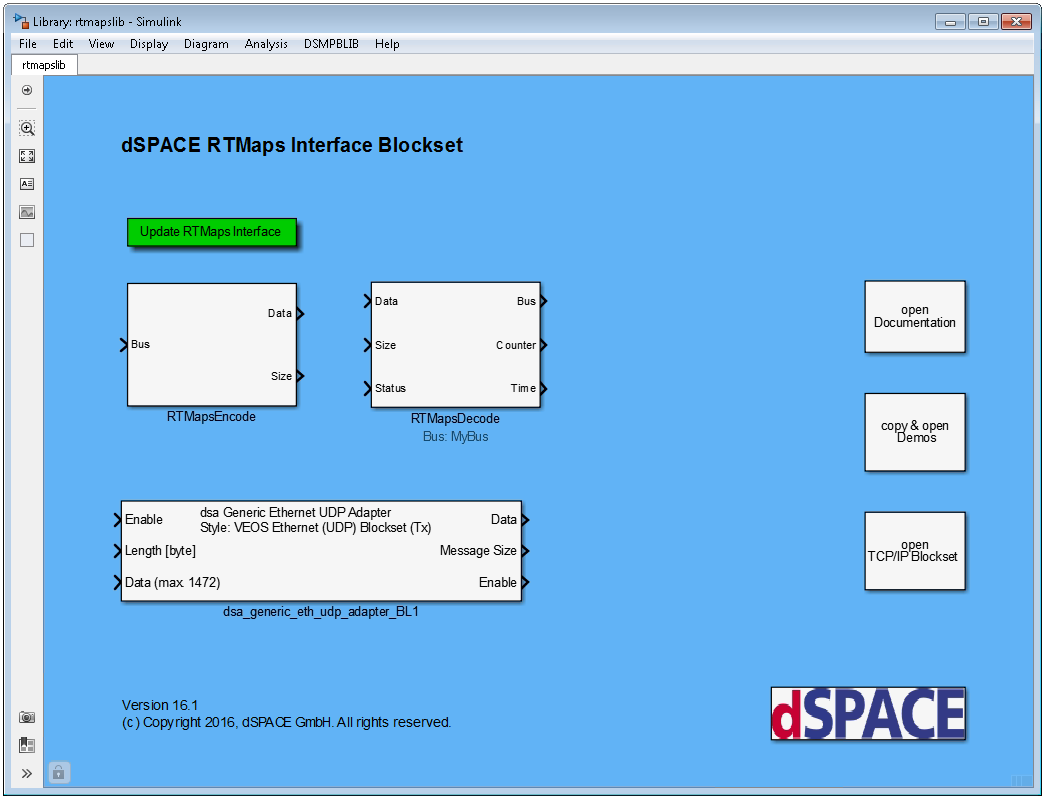
Das dSPACE RTMaps Interface Blockset for Simulink® ermöglicht die bidirektionale, latenzarme Kommunikation über UDP/IP zwischen RTMaps von Intempora und dSPACE Echtzeitsystemen oder der PC-basierten Simulationsplattform dSPACE VEOS.
- Simulink-Blockset für latenzarme Kommunikation und Taktsynchronisierung zwischen dSPACE Plattformen und RTMaps
- Aufzeichnen und Wiedergeben von zeitkorrelierten Daten
- Einfache Entwicklung von Anwendungen für Fahrerassistenzsysteme und automatisiertes Fahren.
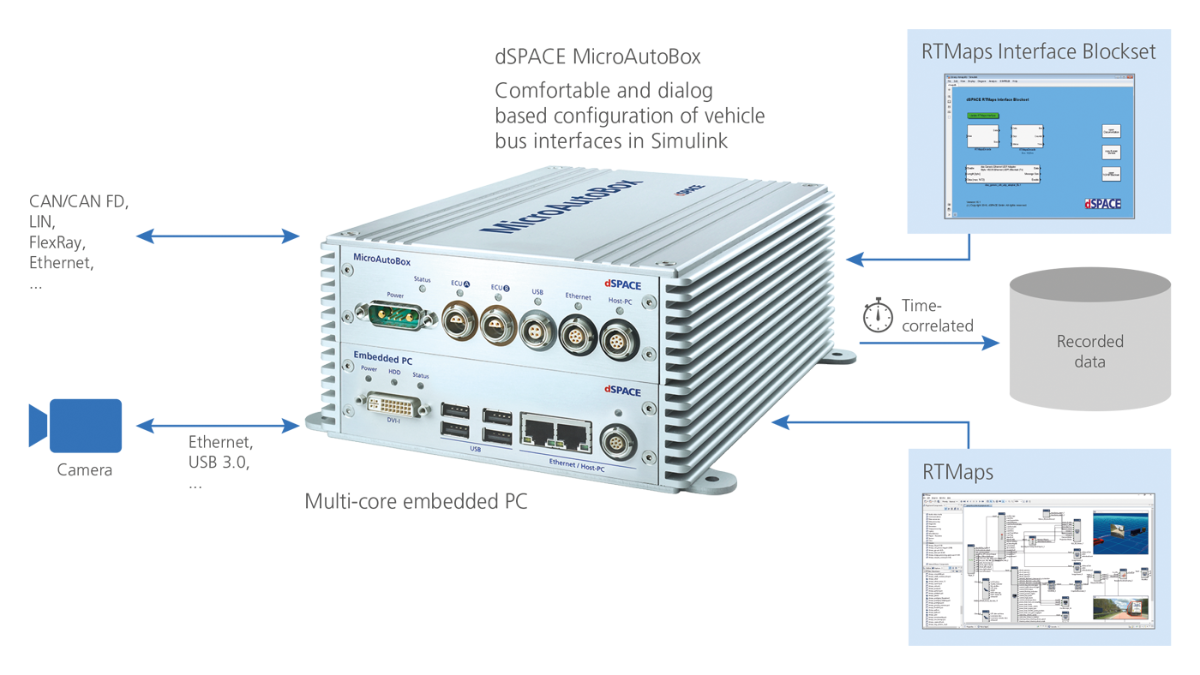
Recording and time correlation of camera and vehicle bus data.
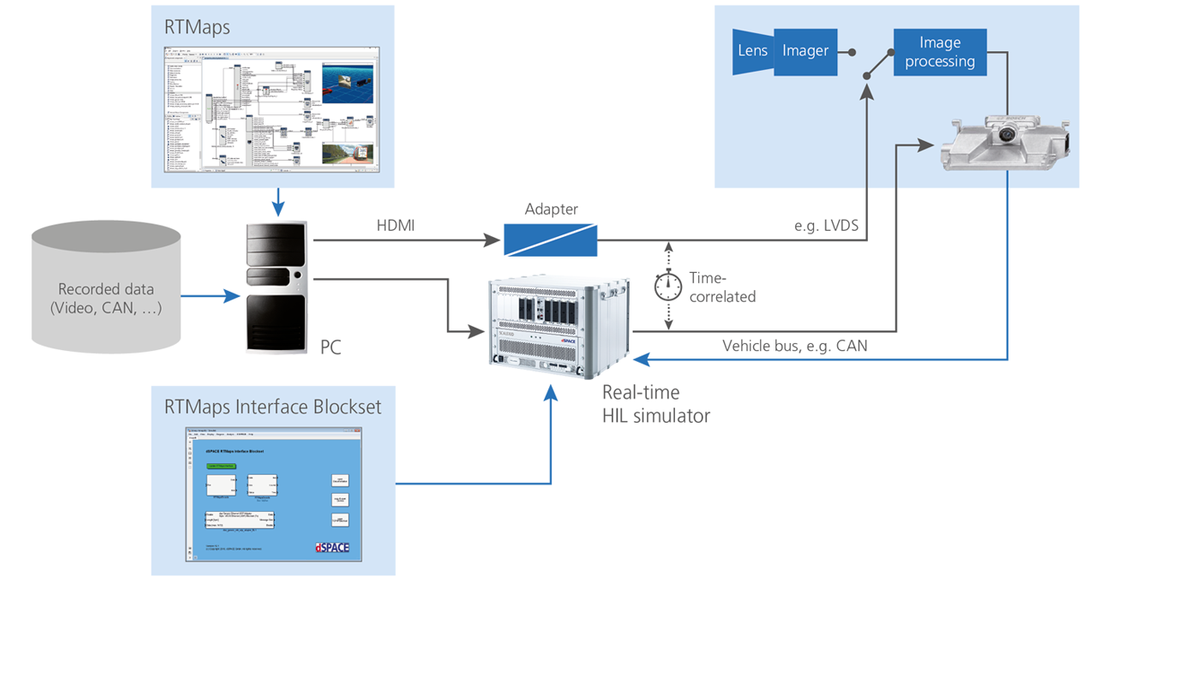
Open-loop HIL tests of electronic control units for image processing.



Anwendungsbereiche
Der konventionelle Fahrzeug-Software-Stack stößt an seine Grenzen, da hartes Echtzeit-Controller-basiertes Prototyping für anspruchsvolle Fahrassistenzsysteme und autonomes Fahren (ADAS/AD) nicht mehr ausreichend ist. Als Ergebnis entstanden zwei Prototyping-Welten, von denen die eine für die Perzeption und Datenfusion und die andere für die harte Echtzeitausführung bestimmt ist.
Üblicherweise werden Datenverarbeitungs- und Absicherungsalgorithmen mit einer anspruchsvollen Programmiersprache wie C++ implementiert, wohingegen die Entwicklung von Applikationsfunktionen auf dem modellbasierten Entwurfsansatz mit MATLAB®/Simulink® und dSPACE Echtzeitsystemen basiert. RTMaps von Intempora ist ein etabliertes Werkzeug mit einzigartiger Leistung für das Prototyping von C++-basierten Multisensoranwendungen durch Blockschaltbilder. Zudem können Daten mit RTMaps präzise zeitgestempelt, aufgezeichnet und wiedergegeben werden.
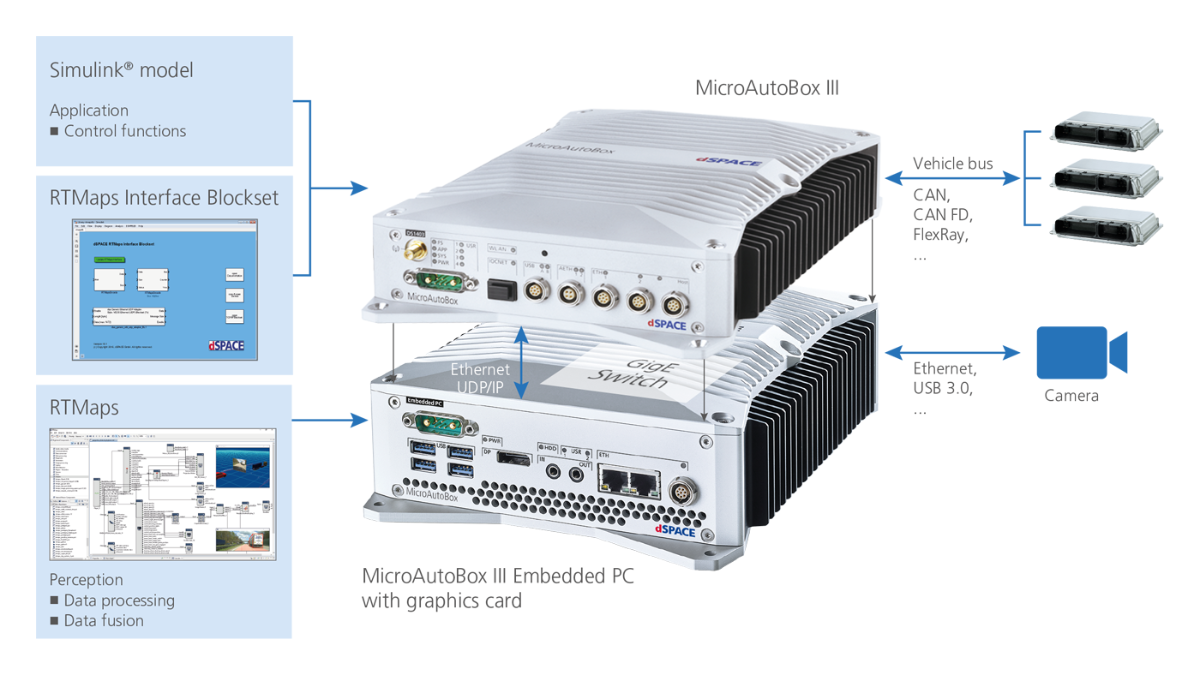
Das dSPACE RTMaps Interface Blockset verbindet dSPACE Plattformen wie dSPACE Echtzeitsysteme oder VEOS über UDP/IP mit RTMaps.
Vorteile
Das dSPACE RTMaps Interface Blockset ermöglicht die bidirektionale, latenzarme Kommunikation über UDP/IP zwischen RTMaps von Intempora und dSPACE Echtzeitsystemen oder der PC-basierten Simulationsplattform dSPACE VEOS. In nur wenigen Schritten können Entwickler ihre Anwendungen in Simulink über Signalbusse mit den entsprechenden Kommunikationsblöcken verbinden und Datenverbindungen mit Multisensoranwendungen in RTMaps einrichten. Die erforderliche Beschreibung der zu übertragenden oder zu empfangenden Daten wird als XML-Datei aus den entsprechenden Signalbussen auf Knopfdruck in Simulink generiert. Zudem erlaubt das Blockset die Synchronisierung der Taktrate in RTMaps mit dem Simulationstakt oder Echtzeittakt der dSPACE Plattformen. Dadurch können zum Beispiel Fahrzeugbusdaten auf der dSPACE MicroAutoBox erfasst, aufgezeichnet und präzise mit den Kameradaten in RTMaps abgeglichen werden. Ein weiterer Anwendungsfall ist der Open-Loop (Data Replay)-Test von bildverarbeitenden Steuergeräten. In diesem Szenario gibt RTMaps auf einem PC zeitkorrelierte Video- und Busdaten wieder, während die Bussignale an ein Hardware-in-the-Loop (HIL)-System gesendet werden. Dadurch ist eine low-jitter Restbussimulation garantiert.
Das RTMaps Interface Blockset ist die leistungsstarke Verbindung zwischen RTMaps und dSPACE Plattformen und vereinfacht die Entwicklung und den Test von Perzeptions- und Anwendungsalgorithmen für Fahrerassistenzsysteme und automatisiertes Fahren.
| Functionality | Description |
|---|---|
| General |
|
| Ethernet communication |
|
-
- Online-Ansicht
- Download
- Vertrieb Unsere Mitarbeiter im technischen Vertrieb beraten Sie bei der Auswahl Ihres dSPACE Systems. Auch für Preisauskünfte oder Informationen zu weiteren dSPACE Produkten stehen sie Ihnen gerne zur Verfügung.
- Beziehen von dSPACE Software Informationen zum Herunterladen, Installieren und Lizenzieren von dSPACE Software
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.