使用TargetLink,您可以将图形化模型直接从Simulink® 转换为最佳产品级代码。
自动生成代码
TargetLink可自动生成高质量的C/ C++代码,让您能够专注于自己的应用。
汽车标准
TargetLink提供高性能的Classic和Adaptive AUTOSAR支持。
认证证书
TargetLink已通过ISO 26262、ISO 25119和IEC 61508等功能安全标准认证。
满足开发人员的需求
专为满足软件开发人员的需求而构建,并在全球数百万辆汽车中得到验证。
什么是TargetLink?
TargetLink是一种软件,可直接从MathWorks ® Simulink ® /Stateflow ® 为电子控制单元 (ECU) 和域控制器生成高效的C代码。TargetLink是基于模型的嵌入式产品级软件和系统开发必不可少的工具。
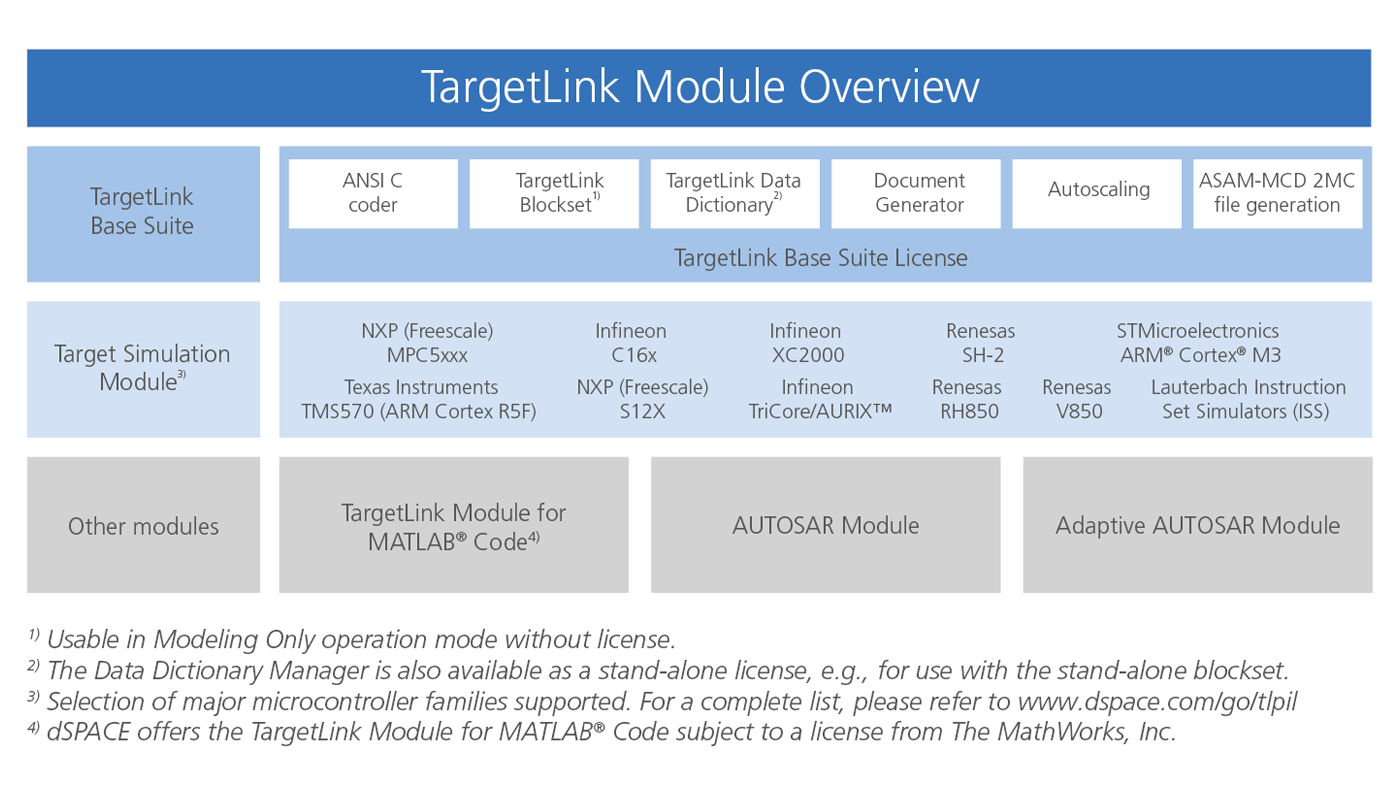
TargetLink中的C代码生成选项有很多种,从简单的ANSI C代码到AUTOSAR平台所用的经过优化的定点或浮点代码都有。TargetLink支持Adaptive AUTOSAR,因此支持C++代码生成。此外,TargetLink具有软件设计功能,以及内置的优化、仿真和测试功能,使您能够快速验证和优化生成的结果。TargetLink可以与dSPACE的其他工具以及其他厂商的工具进行顺利交互,共同形成Targetlink生态系统。
应用领域
TargetLink使您能够为汽车行业和其他领域的ECU和域控制器开发产品级软件,涵盖以下应用:
- 电动出行和电动驱动系统
- 高级驾驶辅助系统 (ADAS)
- 高度自动化和自动驾驶汽车
- 舒适电子设备
等等。
自动生成代码

汽车标准

认证证书

满足开发人员的需求

强大的辅助工具

功能概述
| 特点 | 描述 | 优势 |
| 代码效率 | 直接从Simulink®/Stateflow®生成的高效定点和浮点产品级代码(支持包含的MATLAB代码,参见可选模块) | 您的规格(模型和图表)直接转换为高效的C代码 |
| 代码可靠性 | 将模型一致、可靠地转换为经过压力测试的C代码 | 可避免输入错误、疏忽、误解等错误 |
|
人类可读性
|
简洁、可读的代码 | 易于执行代码审查 |
| 自动缩放 | 基于信号范围最坏情况传播的智能缩放和基于仿真的缩放 | 缩短耗时长且容易出错的缩放过程 |
| 测试机制 | 根据规格测试产品级代码的各种测试级别(MIL、SIL、PIL) | 在最早的阶段发现故障 |
| 增量式代码生成 | 针对特定子系统生成模块化代码 | 加快代码生成,保留经验证的代码 |
| 模型引用支持 | 在模块化/组件的基础上开发模型 | 大型团队的分布式开发更容易,可更有效地处理大模型。 |
| 多速率代码 | 完全支持具有任务间通信的多速率系统 | 您可以在模块级定义任务 |
| TargetLink Data Dictionary | 处理变量、数据结构、缩放公式、任务、功能的中心容器 | 您可以管理复杂的数据,以规划和组织您的项目 |
| 符合标准 | 符合相关标准,例如ASAM-MCD 2MC (ASAP2)、AUTOSAR和MISRA | 保证质量和互操作性 |
| 校准数据生成 | 将校准数据导出为校准工具的ASAM-MCD 2MC (ASAP2)文件 | 模型和校准数据之间保持完美一致性的自动化和完整的过程 |
| 文档记录 | 自动模型和代码文档 | 您的项目透明、可跟踪 |
| AUTOSAR软件组件 (SWC) 容器交换 | 在TargetLink和SystemDesk之间交换AUTOSAR SWC容器 |
安全便捷的AUTOSAR软件开发往返过程。
可访问SystemDesk仿真,以进行适当的软件集成测试。 |
| 基于组件的开发 | 端口、测量信号和校准参数的创新接口概念 | 轻松提高软件在不同项目中的重复使用 |
| 连接dSPACE VEOS | 从TargetLink导出虚拟ECU,结合其他虚拟ECU和ControlDesk等标准的dSPACE工具在VEOS中运行。 | 易于测试和试验TargetLink代码 |
| FMI 支持 | 从TargetLink 模型中导出符合功能模型接口 (FMI) 标准的功能模型单元 (FMU) | 通过第三方供应商和dSPACE的离线和实时仿真器执行Targetlink生成的代码 |
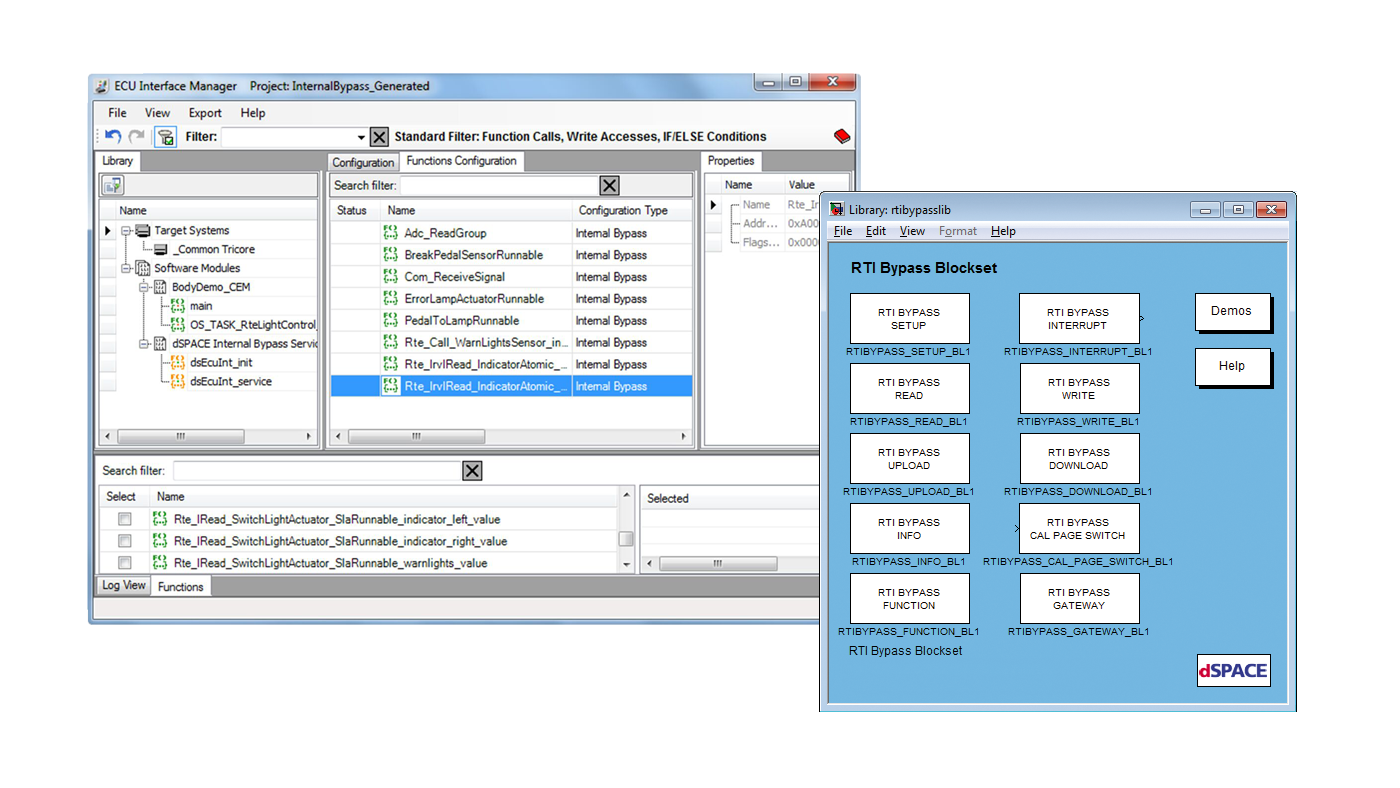
| 面向目标旁路 | 将新的功能直接集成到现有的ECU中(使用TargetLink和dSPACE ECU接口软件)。 |
从原型开发无缝过渡到量产。
无需执行复杂的软件集成。 |
必需和可选软件
| 必需软件 | 集成式开发环境 |
|
| 操作系统 | www.dspace.com/go/os_compatibility | |
| 可选软件 | 适用于处理器在环测试的编译器 |
适用于使用Target仿真模块进行处理器在环测试的
针对性编译器 |
| 适用于面向目标旁路的工具链 |
|
|
| 运行虚拟ECU | VEOS | |
|
ConfigurationDesk,适用于使用dSPACE实时
系统2)和TargetLink的场景 |
||
| 系统架构建模并生成虚拟ECU | SystemDesk | |
|
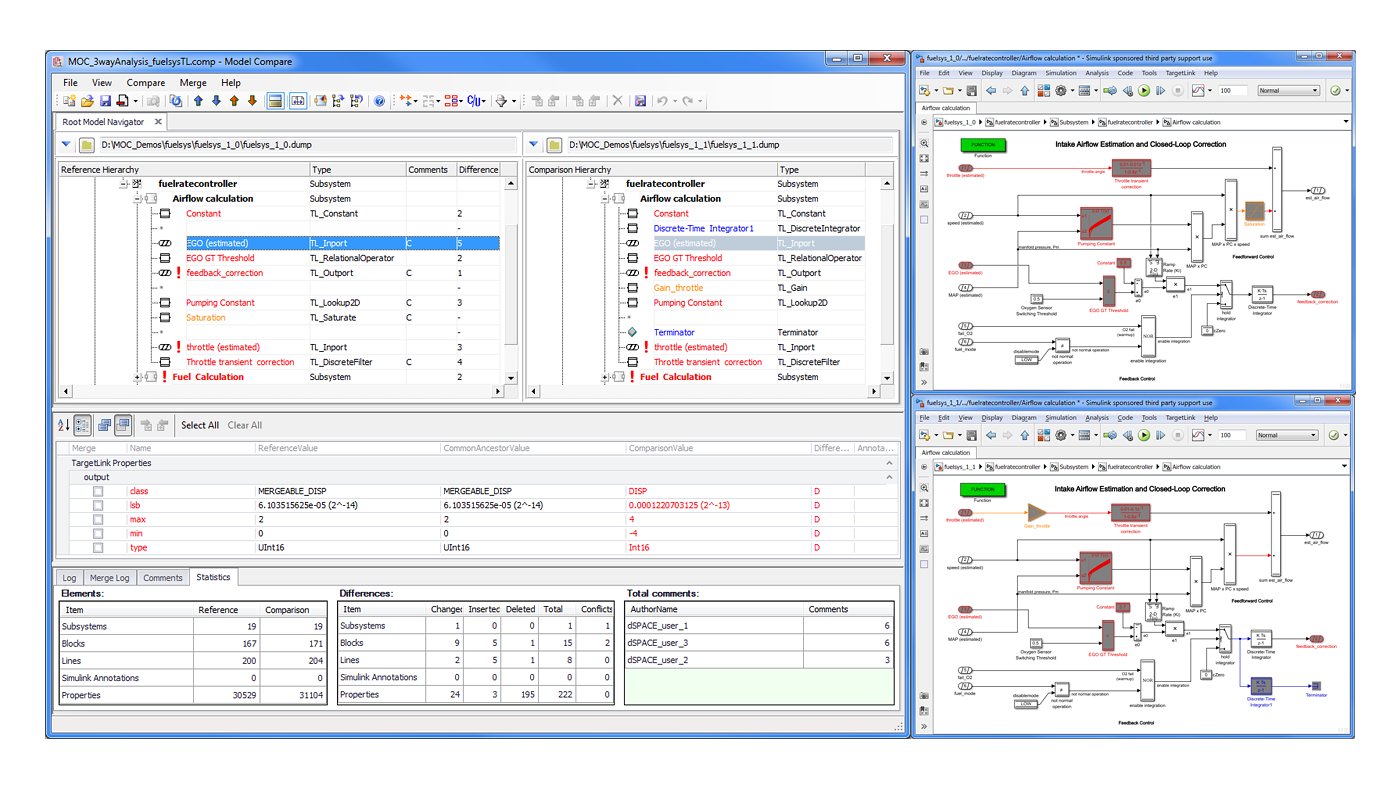
比较MathWorks® Simulink®、Stateflow®和
dSPACE TargetLink模型 |
模型比较 | |
| AUTOSAR工件的两个版本进行比较 | dSPACE AUTOSAR Compare |