dSPACE XCP Service
Measurement, calibration, bypassing, and ECU flash programming via XCP
- Support of transport layers for CAN/CAN FD and Ethernet
- Calibration, measurement and bypassing in parallel
- Safety and data consistency mechanisms for bypassing

At a Glance
Application Areas
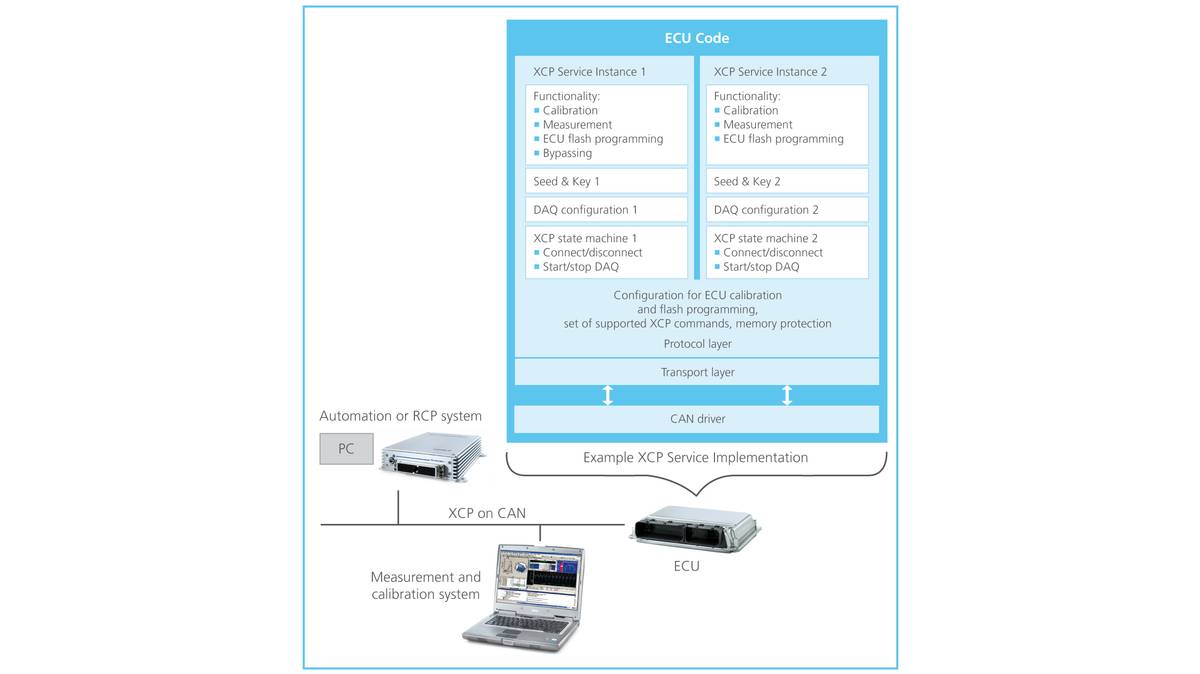
The Universal Measurement and Calibration Protocol (XCP) is the successor to the well-established CAN Calibration Protocol (CCP). XCP is standardized by the Association for Standardization of Automation and Measuring Systems (ASAM).
The dSPACE XCP Service supports transport layers for CAN/CAN FD and Ethernet (UPD/IP and TCP/IP). It is designed for various use cases during ECU development, such as measuring ECU variables and calibration, and also for ECU flash programming in connection with CAN/CAN FD.
The dSPACE XCP Service implementation is also dedicated to bypassing ECU functions by using the dSPACE real-time prototyping platforms MicroAutoBox II (the former MicroAutoBox can also be used) and AutoBox.
Key Benefits
Depending on the transport layer, the dSPACE XCP Service covers various aspects of XCP, from measurement and ECU calibration to bypassing and ECU flash programming.
Flexible configuration options make it possible to tailor the service implementation with regard to functionality and resource consumption in the ECU.
For bypassing, dedicated mechanisms are provided to guarantee minimal latencies, data consistency, and automatic failure checking. In addition, you can run measurement, calibration, and bypassing tasks in parallel on the same ECU.
dSPACE provides consulting and engineering services to help you integrate the dSPACE XCP service into your ECU.
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.