Lidar Module
激光雷达传感器的真实仿真
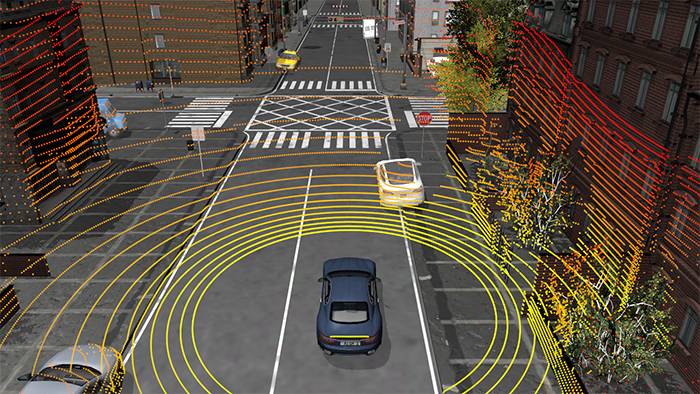
通过物理定律中数学公式对激光雷达前端和传感器环境进行仿真。它能够将原始格式或点云格式的激光雷达数据注入处理链。
The Sensor Simulation products based on MotionDesk can no longer be purchased.
Instead, we offer our new generation of visualization and sensor simulation software: AURELION.
For more information on the product life cycle and the dSPACE product life cycle model in general, please refer to our website.

应用领域
Lidar Module模块是Sensor Simulation的一个组成部分,可根据传感器的设计原理(激光和光电探测器)进行激光雷达传感器仿真。该模块对激光雷达传感器进行真实的、基于物理的仿真,并提供了各种配置选项.环境仿真基于光线跟踪技术。此外,我们还可以使用API扩展激光雷达仿真的功能,用于数据处理算法,包括自定义模型。对于点云的每个点,计算了不同的数值,如表面法向量、方位角、仰角、距离、反射率、相对速度、材料ID和光功率。此外,还可以仿真扫描传感器的射线顺序,并且是可配置的。其中,还考虑了多重回波(例如,半透明材料的传输)。
组件和特征
- 环境模型计算的实时光线跟踪
- 考虑多重回波
- 支持基于闪存的传稿器和扫描传感器
- 通过MotionDesk使用特定于传感器的GUI进行基本传感器配置
- 传感器的位置和方向
- 视角
- 传感器特定属性,例如,仿真光线的方位角、仰角、时间和时间顺序的配置
推动创新进程。我们始终在技术开发的最前沿。
欢迎订阅我们简讯,了解我们的专业技术以及产品。希望我们的成功案例能够对您有所帮助。快速了解仿真和验证的最新信息。欢迎订阅/管理dSPACE简讯和dSPACE航空速报。