超声波传感器的仿真模型
|
発行元: 2020年09月15日 |
动机
自21世纪初以来,超声波传感器已被用于主流汽车应用,为驾驶员提供障碍物距离反馈。这一领域的发展方兴未艾,现在这些传感器也是自动泊车操作中的关键反馈组件。由于超声波传感器的数量、安装位置、物理形状、油漆颜色和超声波特性的变化,使其测试变得很困难。然而,由于超声波传感器不仅能够收集信息,实现近场监控的传感器融合,还在实现L3、L4和L5级自动驾驶方面发挥着重要作用,因此需要进行彻底的测试。
dSPACE开发了一个测试系统,即Ultrasonic Sensor Test System (Lab),通过OTA方式激励超声波传感器。系统在运行时不需要任何运动组件。它是被测设备(DUT)不可知的,可以与虚拟dSPACE ASMU ltrasonic Sensor Model级联,该模型通过射线数据在虚拟环境中检测障碍物。
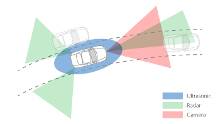
该系统还可以与其它dSPACE仿真选项(如摄像头和雷达)结合使用。

系统概述
Ultrasonic Sensor Test System (Lab)通常由运行ASM Vehicle Dynamics and Traffic模块的实时SCALEXIO处理单元、执行dSPACE变换器低级处理的高性能FPGA板卡和读取ECU输出的通信网络组成。
在DUT传感器和ECU之间没有窃听或操纵,这意味着通信协议不必公开,DUT系统被视为一个黑匣子。
当DUT传感器发射超声波脉冲包进行距离测量时,数据包由dSPACE收发器捕获和处理。经过与距离成比例的延时后,dSPACE收发器向DUT传感器发射一个超声波脉冲。
Ultrasonic Sensor Test System (Lab)
测试系统提供单机版本或集成在SCALEXIO定制化机架系统中。现有的dSPACE硬件在环仿真器底盘可以通过Mobile Ultrasonic Sensor Test System进行扩展。
如果您想在机架外部使用ECU,为了方便起见,ECU及其传感器与机架内部信号线束分开。在这种情况下,电子控制单元的线路只能馈通而不能分接。BNC连接器安装在系统前部,便于进行电气检查。
即使尺寸仅为555 x 560 x 340 mm,dSPACE系统也支持多达12个传感器。
dSPACE传感器和信号发生器通过OTA方式与真实的泊车传感器连接,通过传感器夹相连,并与外部干扰隔离。dSPACE实时系统与 Ultrasonic Sensor Test System (Lab)分离。
The dSPACE sensor and signal generators are connected to the real parking sensors over the air, attached with sensor clamps, and isolated from external interferences. The dSPACE real-time system is separate from the Ultrasonic Sensor Test System (Lab).
软件概述
在dSPACE实时系统上运行的软件实现包括两个部分:SCALEXIO Processing Unit及FPGA应用。
- SCALEXIO Processing Unit运行ASM Ultrasonic Sensor Model、ASM Traffic Model以及FPGA应用程序自带以及接入的接口模块。
- FPGA应用程序包含底层逻辑,是I/O的接口。不需要有关测量模式和模式的信息。
处理单元和FPGA板卡之间的接口主要用于对FPGA应用程序进行参数化,监控FPGA的低电平信号以及计算出的器件特性,如频率。
ASM Ultrasonic Sensor Model的特点
ASM Ultrasonic Sensor Model 提供了真实的回波计算,用于OTA仿真。同一个模型可用于在软件在环仿真中测试和开发算法,为客户提供不同开发阶段之间的无缝过渡。该模型进行优化,用于高度优化的计算,并且在SCALEXIO系统的处理单元上运行,而不需要使用额外的GPU。
传感器模型提供了许多特性,以尽可能接近真实世界的行为。其特点包括:
真实且简单的对象参数化
ASM Ultrasonic Sensor Model 使用了一个真实且易于使用的对象参数化模型。对象由轮廓线及其高度进行定义,这将导致轮廓线挤出。这些对象有六个自由度,可以用于任何用例。
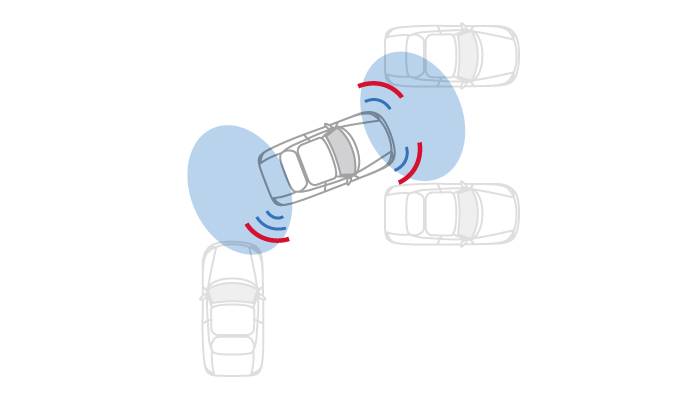
直接和间接(交叉)回波
对于直接回波,使用相同的传感器进行发送和接收。对于间接回波(通常称为交叉回波),回波的发送者和接收者是不同的。间接回波为ECU提供附加信息,因此通常需要有效检测。ASM Ultrasonic Sensor Model 计算每个传感器的直接和间接回波。
每个ECU测量的多个回波
现代超声波传感器可以检测和处理来自一个或多个物体的多个回波。ASM Ultrasonic Sensor Model 为每个对象以及每个发送周期的多个对象提供多个真实的回波。
超声传感器FPGA应用的自由度
dSPACE系统使用FPGA应用程序中的四个自由度生成真实的回波:
- 飞行时间(ToF)
超声波测距是基于波传播时间的。波来回传播的时间与距离成正比。环境条件,特别是温度,会影响空气中的波速,可以在动态模型(仿真)或通过温度室(物理)中考虑距离计算。 - 振幅
根据障碍物的位置、角度和特性,一部分测量能量会反弹,而有些能量要么被吸收,要么以不同的方向反弹。由于我们可能对所生成回波振幅进行操纵,因此其提供了真实的行为。 - 频率
FPGA应用程序支持典型汽车范围内的固定和调制频率。 - 脉冲数
传输的测量波的脉冲数可能会变化,因此在FPGA应用中也可能会出现这种现象。
在运行时,频率和脉冲数可能无法用于直接操作。
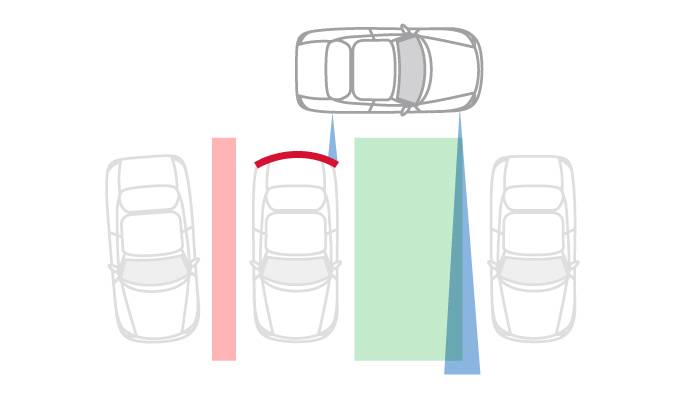
应用示例:停车位测量(PSM)
Ultrasonic Sensor Test System(Lab)和ASM Ultrasonic Sensor Model系统的众多应用之一是停车位测量(PSM)系统的验证。这些系统测量纵向或横向停车位的宽度,并启动停车操作。这样的场景可以通过dSPACE ModelDesk进行参数化,也可以用dSPACE MotionDesk和dSPACE ControlDesk进行实时可视化。Ultrasonic Sensor Test System(Lab)接收模型计算出的回波,并对DUT超声波传感器进行激励。
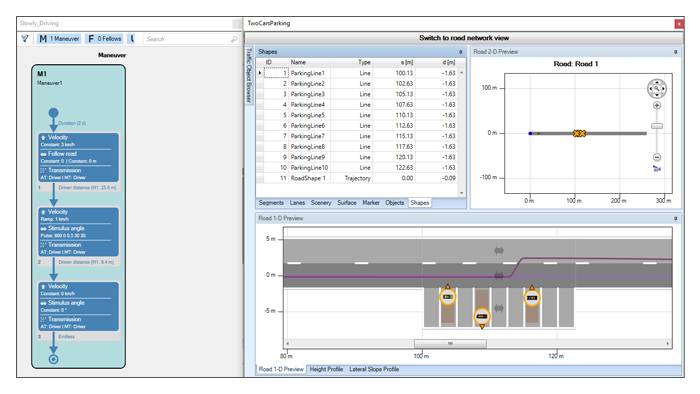



当与被测设备的距离测量被触发时,dSPACE传感器会分析波形的特性,如频率和振幅。同时,定时器启动,当飞行时间与ASM Ultrasonic Sensor Model计算的回波距离成比例时,dSPACE信号发生器会触发一个特性相近的回波信号。
优点
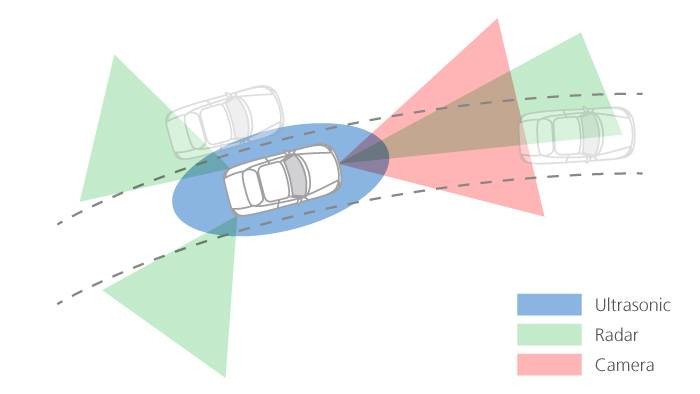
dSPACE Ultrasonic Sensor Test System(Lab)和ASM Ultrasonic Sensor Model进行结合之后,能够通过OTA方式对无限的场景进行精确而可复现的仿真和测试。将ASM Ultrasonic Sensor Model集成到dSPACE工具链中,可以方便直观地对场景进行参数化,并在MotionDesk中实现生动的可视化。Ultrasonic Sensor Test System(Lab)提供了一个解决方案,并测试一个真正的停车ECU和超声波传感器,并在运行期间没有线分接或移动组件,并且能够轻松集成到现有系统中。测试系统尺寸紧凑,可以作为单机版本,也可以作为full-size系统的组件。该系统可通过其它dSPACE传感器仿真选项进行扩展,用于ADAS/AD任务中的融合,例如摄像头、激光雷达和雷达。
推动创新进程。我们始终在技术开发的最前沿。
欢迎订阅我们简讯,了解我们的专业技术以及产品。希望我们的成功案例能够对您有所帮助。快速了解仿真和验证的最新信息。欢迎订阅/管理dSPACE简讯和dSPACE航空速报。