SERES是一家全球运输技术企业,专注于开发和制造智能电动车辆,以创建更安全、更清洁的可持续发展社区。SERES 技术致力于为全球市场提供更出色的安全性、便利性以及更佳性能。SERES 在美国、中国和日本有众多制造、装配和研发设备,并一直成功运营。
SilkRides 和自动驾驶战略
SilkRides 是 SERES 的一个业务公司,负责开发自动驾驶 (AD) 技术。我们的团队沿袭了硅谷的 OEM 传统,专为汽车制造商提供高性价比的开放式自动驾驶解决方案。SilkRides 成立于 2017 年,已在城市和公路场景中展示了 Level 3 和 Level 4 自动驾驶实力。
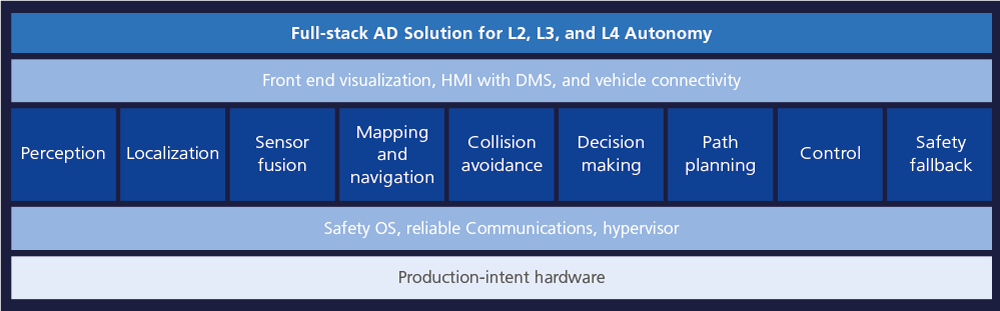
SilkRides AD Stack
该团队负责与开发和制造自动驾驶车辆有关的全部技术,其中包括感知、规划和控制方面的专业知识。这些知识不仅用于开发,而且还用于验证这些与安全相关的领域以及 OTA 软件更新、硬件设计等,其中的一个关键组件是部分基于人工智能的域控制单元。它用于评估传感器数据并确定驾驶策略。在第一步中,它是作为原型控制器实现的,然后逐步开发以进行大规模生产。
自动驾驶验证的挑战
为了证明自动驾驶系统与人工驾驶一样安全,可能需要在真实的路况下进行数十亿英里的驾驶测试进行验证。此外,软件的每次更新都必须经过严格的测试。在 SERES,我们的测试资源有限,日程也很紧张,因此进行大规模的道路测试是不现实的。为了加快我们的开发和验证周期,我们希望通过不同级别的仿真来建立我们的验证和确认流水线。这样在道路测试之前,我们可以对每个软件版本的关键场景和关键案例进行测试。

dSPACE 雷达测试台架
为了测试整个效应链,dSPACE雷达测试台架提供了雷达传感器的OTA激励。如果需要,仿真对象可以包括车辆的前保险杠和底盘组件。这样,就可以考虑到所有的软硬件层,从探测雷达前端的信号到在雷达 ECU 中对其进行评估都包含在内。这个非常紧凑的测试台架主要包括一个具有集成天线(用于发送/接收功能)的电波暗室、一个经过标定的 dSPACE Automotive Radar Test System (DARTS) 和一个 SCALEXIO HIL 仿真器。为了进行测试,雷达传感器被锁在电波暗室内,由真实雷达回波进行激励。通过相干回波,雷达 ECU 能够可靠地确定雷达目标的距离、速度、雷达截面 (RCS) 和角度。我们使用两台 DARTS 9030-M 装置测试前雷达。对于角雷达,SERES 安装了一台特别适合短距离激励的 DARTS 9030-MS 装置。此配置足以测试所有相关的驾驶场景。
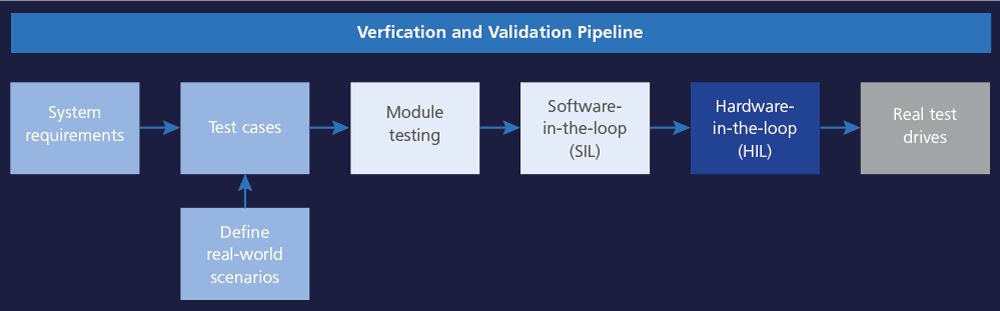
SilkRides 测试流水线
在 SilkRides,每个软件版本都要经过多个级别的测试,之后才能应用于待测车辆。首先,我们进行单元测试和模块测试,以确保新软件组件的运行符合预期。然后,新组件与其余的决策和规划模块进行集成,用于软件在环 (SIL) 测试。在测试中,软件通过相关测试案例对仿真车辆进行引导,从而评估其性能。如果 SIL 测试结果符合预期,则会在域控制器硬件上编译新的软件版本,以进行硬件在环 (HIL) 测试。该过程对于测试工件(例如虚拟道路)能够保证一定的数据一致性。在 SIL 和 HIL 测试过程中,将会观察并修复许多涉及软件的问题以及软件和硬件之间交互的问题,从而减少验证软件版本所需的测试车辆数量和道路测试里程。
HIL 测试要求
我们必须通过 HIL 测试解决一些关键需求,以便在 SilkRides 进行自动驾驶开发:
- 软件和硬件的内部集成:我们希望通过 HIL 测试尽早在我们的域控制器上测试软件。嵌入式软件集成或硬件上的实时操作引起的所有问题都可以在车辆测试之前识别和补救。
- 第三方传感器的集成测试:借助 OTA 雷达和摄像头测试台架,我们可以在 HIL 测试系统中集成真正的传感器。由传感器驱动器、线束和传感器引起的问题可以在 HIL 测试中解决。
- 用于极端案例的安全实验室测试平台:在道路上测试极端情况和硬件故障可能很危险,并且不能在 SIL 仿真中进行模拟。通过 HIL 系统,我们能够在实验室的安全环境中验证这些潜在危险情况。有关此操作的详细信息,请参阅“故障操作功能的仿真”部分。
测试系统的设置
为了执行详细而全面的实验室测试,我们进行了灵活、完整的设置,其中包括 SilkRides AD Stack。我们与 dSPACE 共同定义了一个系统,可以帮助我们完成传感器、控制器和执行器的集成测试。它包含一个可以真实代表我们车辆的 HIL 仿真器。此外,我们还使用四个同步传感器测试台架对其进行了扩展,将真实雷达和传感器添加到在环中。由于可以使用真实组件,我们还能在开发的早期阶段评估不同组件的性能。
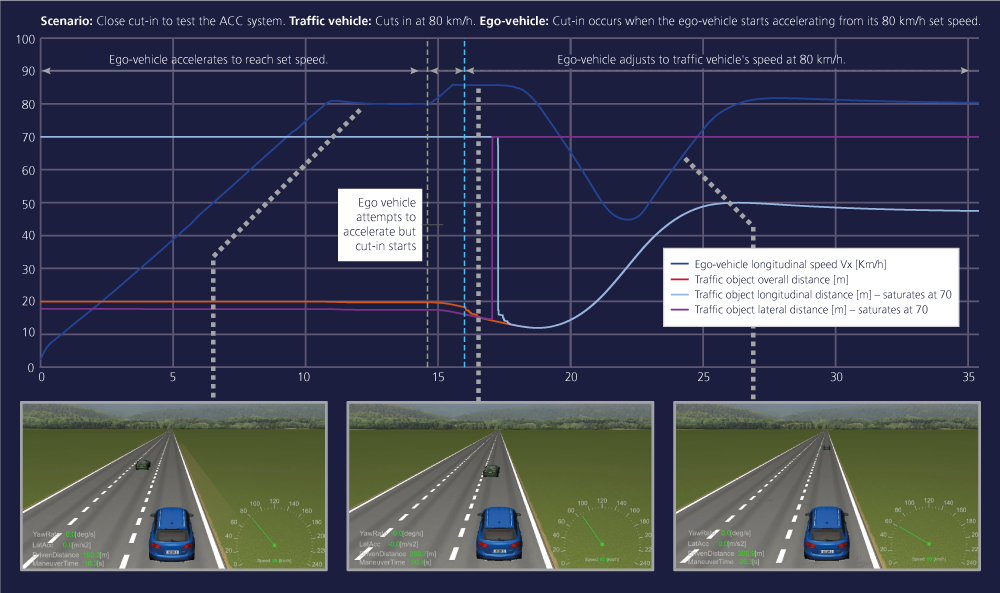
闭环测试
仿真的对象随后传入传感器测试台架,以激励雷达和摄像头传感器。传感器信号是待测设备的输入,待测设备是我们的控制器,运行已开发的自动驾驶软件,而这些自动驾驶软件具有感知和传感器融合算法。这样,所有自动驾驶组件都会被集成,我们需要考虑它们的真实行为。每次虚拟驾驶测试都通过 3D 动画实时监控。

dSPACE摄像头盒
为了测试摄像头的感应特性,我们通过 dSPACE 摄像头盒对摄像头成像器芯片进行 OTA 激励。为此,它配备了显示器来显示仿真的传感器环境(例如,由众多车辆、行人、路边结构物等组成的交通场景)。之后,摄像头会进一步处理数据。为了最大限度地减少额外的光源或眩光,所有组件都安装在一个封闭的盒子内。
灵活的传感器集成
自动驾驶领域正在迅速发展,因此我们应该与时俱进,将目光投向能够适应形势变化的领域。我们选择 dSPACE OTA 雷达和摄像头测试台架是因为它们能够灵活适应不同的传感器类型和传感器配置。OTA 方法显著降低了执行合理性测试的难度,使之变得十分轻松。这样,传感器(完整控制单元,包括信号处理软件)的行为可以在规定的条件下,尤其是临界情况下进行评估。在这些情况中,无论对象是否被传感器检测到,对于进一步处理传感器信号的软件开发来说都是至关重要的。
使用雷达室进行传感器基准测试
SilkRides 依靠汽车 Tier 1 供应商提供雷达传感器,因此在选择供应商时,必须要考虑是否对传感器之间的性能进行精确的基准测试。在车辆上进行雷达性能测试时,通常需要一个较大的测试场地,并且通常需要在安装地面实况设备的情况下,让待测车辆和目标车辆同时移动。通过闭环雷达测试台,许多测试都可以在实验室中进行,并且能够提供清晰一致的结果。这要归功于安装在每个雷达测试台架上的 dSPACE Automotive Radar Test System (DARTS)。它利用移动的天线通过 OTA 方式产生雷达回波,因此能够极其准确地确定传感器的特性。

面向未来应用的可扩展性
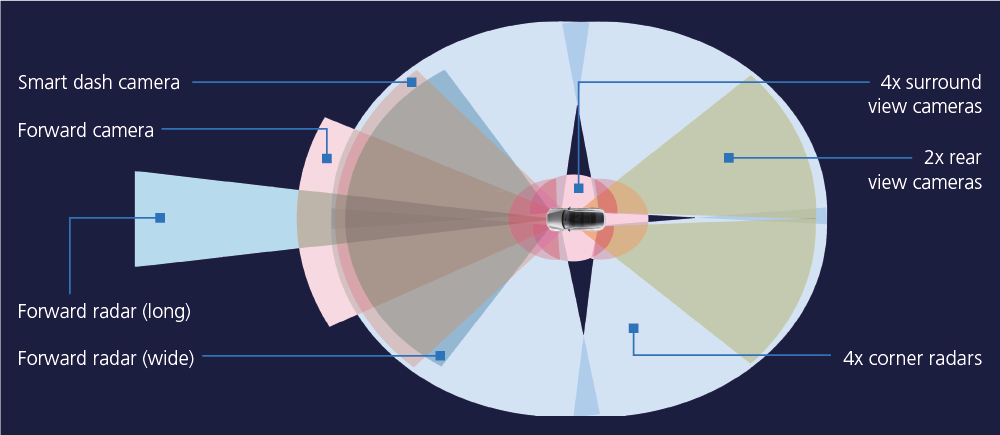
我们的 HIL 系统包含 1 个摄像头、1 个前雷达和 2 个角雷达,它们足以仿真我们系统中的大多数公路驾驶功能,因为角雷达可以配置在车辆的前部、侧面或后部。之后,我们可在 SCALEXIO 平台上添加额外的摄像头、雷达、激光雷达、超声波传感器以及 GNSS 仿真器。由于系统设置灵活,这些既可以是硬件扩展,也可以是软件扩展。例如,系统支持集成 dSPACE Sensor Simulation 工具链中的激光雷达模型,从而仿真整个激光雷达传输通道,包括 3D 环境。
故障操作功能的仿真
随着 SAE Level 3 或以上等级的自动驾驶系统的发展,该系统的许多部分必须在所有操作范围中实现“故障后仍继续工作”的状态。此类故障条件很难在车辆中重现,有时甚至很危险。在发生故障时主功能和备用功能之间的切换,以及各种路况下的安全停车操作都可以在 HIL 测试中进行仿真。
通过自动化实现回归测试
通过 dSPACE 工具,例如 AutomationDesk,我们可以在启动时自动配置测试台架,这大大减少了手动输入步骤。此外,我们的许多测试可以在无需用户操作的情况下自动执行。因此,对于每个新的软件版本或硬件修改,均可系统地评估一组固定的测试案例。
使用高清地图生成场景:海湾大桥
SilkRides 公路驾驶使用第三方地图来进行车道保持辅助、车道变换和路线选择功能。通过集成 dSPACE ASM 和高清地图导入,我们可以确保高度逼真的仿真环境(与真实测试相比)。旧金山湾区海湾大桥的入口和出口呈现了许多具有挑战性的场景。我们已将海湾大桥地图导入 ASM,并在我们的 HIL 测试系统中重新创建了许多此类棘手的测试案例。
总结与展望
dSPACE 测试系统提供了一种独特方法,能够将传感器和控制器集成到虚拟车辆中并一起进行测试。通过使用这种非常真实的测试环境,我们在开发的早期阶段就能掌握所用硬件和软件组件性能的重要信息。因此,我们在早期阶段做出了突破性的决策,进而加快了开发流程。由于测试案例可以轻松地复用,因此可以执行回归测试,对故障排除进行可靠的验证。此外,通过扩展灵活的测试系统和测试库,还可以满足新的需求。我们期待着通过利用这一强大可靠的测试系统进行验证,使我们的新车能够快速上路。
作者简介:
Ziqi Zhu
SERES(美国加利福尼亚州圣克拉拉)

Hala Al-Khalil
SERES(美国加利福尼亚州圣克拉拉)
Samuel Rayseldi
SERES(美国加利福尼亚州圣克拉拉)



