尽管所使用的技术越来越复杂,为了确保自动驾驶系统适合日常使用并确保安全,必须在系统投入使用之前对其进行测试。通过使用dSPACE和 understand.ai解决方案生成仿真场景,可以利用仿真对使用特殊硬件和软件的安全关键型驾驶场景进行上千次测试。
利用一种基于人工智能(AI)的创新方法,dSPACE和understand.ai提供一项新服务——从真实测量的原始数据中生成场景。与汽车中实时或在线计算生成的常规的对象列表相比,根据原始数据生成的后续场景在计算能力方面不受任何限制。这可避免因数据库中错误地检测对象或未检测到对象(分别为误报或漏报)而导致的失误。为了尽可能多地覆盖不同的道路交通场景,在提供物理原型之前,要对许多因素进行虚拟测试。这可以借助测试场景完成。测试场景在众多测试和不同变体中使用,以确保获得有意义的结果。但是,这需要逼真的场景。由于这些场景受特殊要求的约束,专业的场景生成至关重要:场景必须反映许多不同现实环境中的情况。除了天气和交通流量等变量差异较大外,关键场景和非关键场景的平衡组合也很重要。
从道路到实验室 – 包括使用真实数据的测试场景
分析真实情况和验证自动驾驶
为了满足客户要求,我们区分了两种场景类型:用于验证自动驾驶的逻辑场景和用于分析真实情况仿真中故障算法的回放场景。回放场景是基于记录的传感器数据对真实情况的精确重建。这种类型的场景不能通过参数化进行调整,但它们非常适合在实验室中对故障和其它真实事件进行仿真。这样,在可复现的条件下,可以在实验室中调查和纠正驾驶功能故障。此外,通过将真实场景的传感器数据与相同虚拟场景的仿真传感器数据进行比较,可将回放场景用于传感器模型验证。此外,还有一些逻辑场景,在这些场景中,车辆的移动被抽象化和普遍化,以显示场景参数,然后可以调整这些参数来改变场景。这些场景可以通过基于场景的测试来验证ADAS/AD算法。生成的场景具有很大的优势,即可以根据需要对紧急情况(如事故)进行仿真和执行。因此用户能准确地确定那些给ADAS/AD算法带来挑战的参数。
生成场景
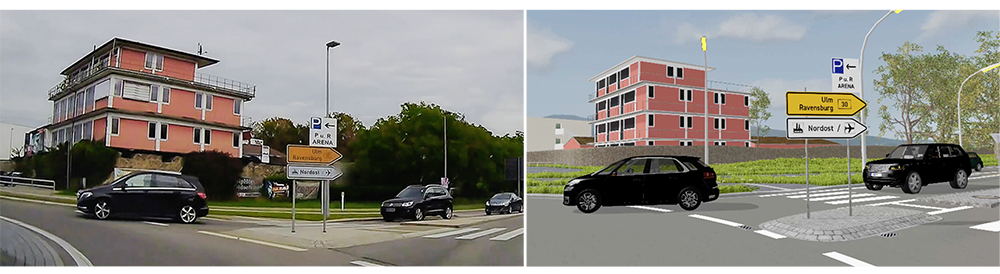
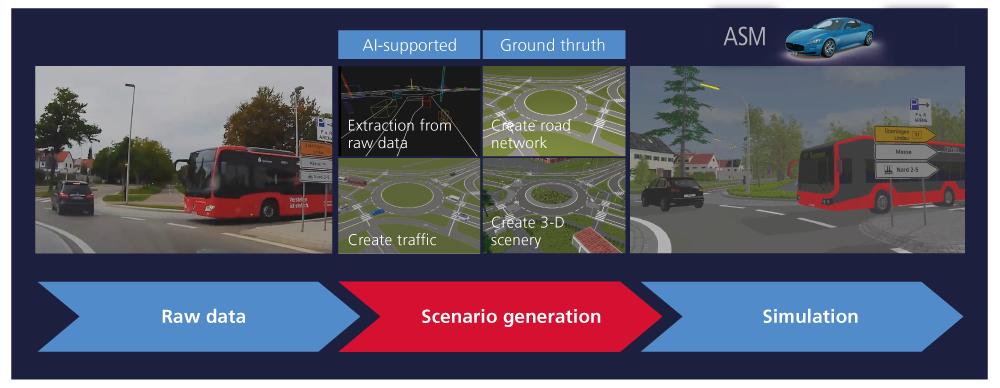
首先必须先生成场景,然后才可在仿真和测试中使用场景。有一些不同的场景生成方法。本文中的示例将先解释基于测量数据的生成。视频记录、激光点云和车辆总线数据都可以应用。它们可以使用特殊的数据记录硬件(如 dSPACE AUTERA)进行记录。这样生成的场景的真实性随着可用数据数量和质量的增加而增加。通过将不同算法进行组合,可以在语义上准确复制真实场景,包括所有道路使用者的运动曲线以及道路和3D 场景(反映静态环境的所有基本要素)。首先,有关道路及其周围环境以及道路使用者轨迹的相关信息是通过基于AI的方法从原始数据中提取的。understand.ai具有可靠的质量保证方法,生成的路面实况可保证所生成场景具有语义的一致性。然后,提取的数据被转换成dSPACE仿真环境的可仿真(回放和逻辑)场景,以及基于OpenDRIVE®和OpenSCENARIO®标准的场景描述。因此,所生成的场景可立即用于广泛的测试,因为除了道路描述和道路使用者的移动曲线描述之外,还会生成详细的3D场景,从而支持物理传感器仿真。此外,也可以使用场景编辑器(如dSPACE ModelDesk)在计算机上以全人工方式和数字方式创建场景。这意味着用户可以根据自己的想法和要求设计场景。虽然设计的可能性在原则上是无限的,但多样性最终会受到各自的次序要求或用户创造力的限制。这种方法的一个优点是可以构建在现实世界中很难重新记录的场景,因为这些场景可能很昂贵或很危险。无论是根据测量数据生成的场景还是以人工方式生成的场景,都可以在dSPACE解决方案中通过调整相应的参数来按需更改车速、天气或其它仿真的道路使用者行为等参数。基于场景的测试的主要优势在于可扩展性,这取决于可用的计算能力。此外,测试可以迁移到云,几乎无限的云容量为虚拟验证领域提供了大量的机会,从而也为整个生产链提供了大量的机会。
新型解决方案组合
基于场景的测试解决方案与dSPACE和understand.ai 的场景生成相结合,帮助客户克服在原型运行过程中遇到的障碍。该解决方案基于经验丰富的开发人员所创建的众多现有场景,以及根据真实记录的传感器数据或对象列表额外生成的场景。因此,在各种逼真且相关的场景下能够进行数百万公里的测试。
从真实驾驶测试中对关键极端场景重新仿真可将真实世界的现实和复杂性应用到仿真中:
- 使用反映真实交通情况的场景。
- 通过调整现有仿真场景获得新的测试用例。
- 在dSPACE仿真环境中立即使用生成的场景,无需进行额外的转换工作(与OpenDRIVE和OpenSCENARIO兼容)。
- 充分利用数据:使用您为仿真记录的已有数据。
《dSPACE杂志》,2020年11月出版