自动驾驶不仅仅需要在车内安装“大量 ADAS”。这是设立自动驾驶车辆 SOTIF 测试标准的原因之一,该标准比 ISO 26262 更全面。泛亚汽车技术中心 (PATAC) 已根据 SOTIF 标准进行测试。
传统车辆的主要风险为系统故障,而自动驾驶车辆更有可能在系统功能设计方面受到限制,这可能导致它在某些情况下的行为与最初的预设不同。这就是自动驾驶车辆的测试方法不同于传统车辆的原因。这进而促使了 SOTIF 测试标准(也称为 ISO PAS 21448)的制定。SOTIF 是 ISO 26262 标准的补充,专为自动驾驶车辆而制定。SOTIF 定义了在执行自动驾驶功能测试时必须采用的合规方法。该方法包括真实的道路测试以及使用仿真器执行的测试。

风险分类
在定义有效测试时,我们需要提前了解可能的场景,这非常有用。一般来说,有四种场景(图 1):已知安全状态、已知风险、未知安全状态和未知风险。已知和未知风险是功能测试的重点。由于可以使用基于需求的测试,因此在这两项任务当中,评估已知风险更容易些。这包括设计定制化测试案例,然后逐步进行处理,与装配线流程非常相似。

测试未知风险
检查未知风险才是真正的挑战。您如何评估您不知道的、未明确定义测试案例的风险情况?此问题的解决方案包括将驾驶场景应用于尽可能多的驾驶变体。这在自动测试的可重现的仿真测试环境中完成。这种方法需要为车辆、传感器(例如雷达、激光雷达、GPS、高清地图)以及环境因素(例如雨水、路况、标志、交通以及各种道路使用者、行人、骑自行车者及其各自的行为)创建精确的虚拟化模型。此类测试场景的建模具有一定优势,因为它支持在无数测试案例中(包括未知风险)改变模型参数值,所有操作的时长都很合理。这是无法使用传统手动测试实现的。

示例:测试车道保持辅助系统
PATAC 已根据 SOTIF 标准对车道保持辅助系统 (LKA) 进行专项测试。通过监控车道标志的摄像头,如果车辆偏离路线,LKA 会自动干预以修正轨迹。LKA 通过电动助力转向 (EPS) 产生的转向扭矩必须足够有效,以达到预期效果,但同时必须足够平稳,以免对驾驶员产生负面影响。针对该场景执行了一次真正的驾驶测试。
当驾驶员遵循典型曲线轨迹行驶时,LKA 通过 CAN 总线在 EPS 中启动校正转向扭矩。该校正转向扭矩在一系列测试运行中逐渐增大,使得驾驶员每次都需要施加更大的转向扭矩。该过程一直持续到驾驶员不能再将车辆保持在车道上。由 LKA 产生的转向扭矩的最大限值刚好低于此时参数值。
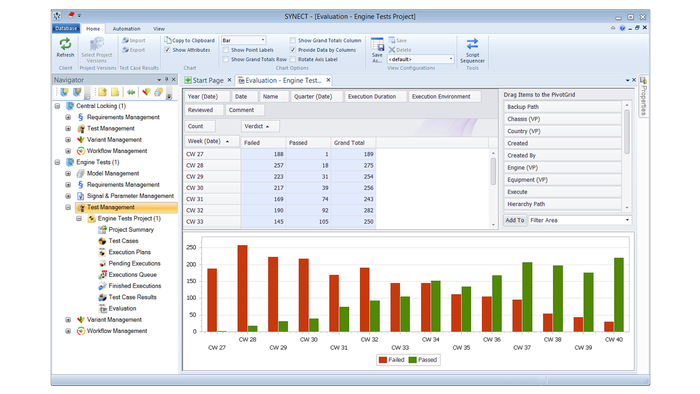
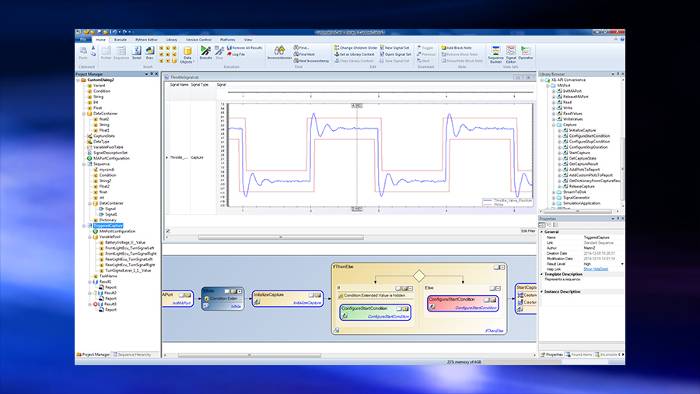
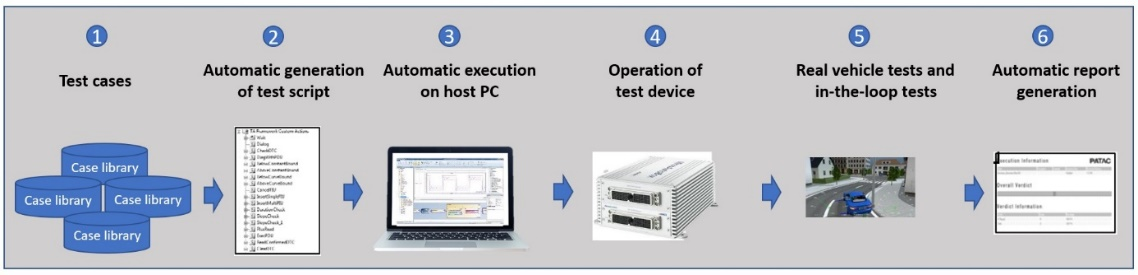
dSPACE工具最大限度简化测试工作
在开发环境中使用了多个dSPACE 硬件和软件工具(图 3)。典型工作流程中的第一项任务(步骤 1 和 2)侧重于为后续自动测试创建测试脚本。在传统工作流程中,这些测试脚本是手动创建的,并且对于每个测试案例,必须重写测试脚本。这需要相当多的时间和精力。在所示的工作环境中,该流程要高效得多:借助 dSPACE SYNECT 和 AutomationDesk,我们可以根据类似测试案例的现有脚本自动创建新的测试脚本。
Excel ® 宏文件支持测试案例的参数设定,因此进一步简化了工作流程。采用这种方法之后,可以通过改变测试参数在非常短的时间内自动仿真无数的测试案例(步骤 3)。这能够以最高的概率覆盖风险,甚至未知的风险,因此对于测试而言,遵循 SOTIF 标准是绝对必要的。然后,使用 HIL 测试平台和/或执行真正的驾驶测试(步骤 4 和 5)对自动驾驶车辆的功能进行真实测试,在此期间,dSPACE MicroAutoBox 作为控制器。之后,将自动为 HIL 测试和真实驾驶测试创建测试协议(步骤 6)。

结论
SOTIF是第一个专为自动驾驶车辆开发而设计的标准。基于 SOTIF 标准的测试甚至可以检测出在自动驾驶车辆的功能设计阶段出现的错误。PATAC 的测试环境配备了 dSPACE 工具链,能够根据 SOTIF 标准进行自动化测试。HIL 测试以及真实驾驶测试是这一测试环境的主要优势。另一项重要优势是能够快速、自动地创建多方面的测试案例。
作者简介:

Shang Shiliang
泛亚汽车技术中心(中国上海)

Cui Haifeng
泛亚汽车技术中心(中国上海)
Yang Chunwei
泛亚汽车技术中心(中国上海)

Guo Mengge
泛亚汽车技术中心(中国上海)
关于PATAC:
PATAC(泛亚汽车技术中心)成立于 1997 年,是通用汽车中国有限责任公司和上海汽车集团股份有限公司(上汽集团)合资筹建的企业。它包括位于上海浦东新区的设计和开发中心,该中心专注于上海通用汽车产品的开发,同时也是通用汽车全球第二大技术开发和设计中心。PATAC 提供设计、技术开发、测试和验证相关的各种汽车开发服务,致力于将自身打造成为汽车开发领域中具有全球影响力的创新型企业。