安全是自动驾驶汽车最重要的因素。在此类车辆的整个开发过程和生命周期中,实际车辆的测试任务必须与其传感器技术的测试一起进行。自动驾驶汽车极其复杂,要全面高效地执行这些测试面临着种种挑战。为完成测试任务,CATARC和dSPACE设计了一个流程和测试系统,可以简便、快速地进行详细的测试。该系统解决了实车验证时出现的难题。零部件产线测试、定期技术检验、认证和售后市场的测试任务中,都需要这种验证方法。

充分、高效地测试自动驾驶车辆
测试的目的是高效地测试自动驾驶汽车,并验证其功能。确保传感器、控制单元和执行器正常运作。特别在危险情况下的测试,如果方法不正确,会以灾难性的后果收场。仿真可以很好地执行和评估这样类似的场景。例如在软件在环(SIL)仿真中,详细分析虚拟交通场景下驾驶测试车辆及其自动驾驶控制系统的行为。为了利用这些关乎安全的场景来测试实车,一个巧妙的解决方案将真实世界和模拟世界结合在了一起:将被测车辆放在与仿真器相连的底盘测功机上。仿真器生成由道路、周围交通、交通标志、行人等组成的虚拟世界。这个虚拟世界转换成物理变量(雷达波、图像),激发自动驾驶车辆的传感器。底盘测功机的物理变量信号(如速度、加速/减速)依次馈送到仿真器,从而关闭控制循环。该测试方法称为车辆在环(VIL)测试。它减少了硬件在环(HIL)仿真和驾驶测试之间的差异。

整车VIL测试台架
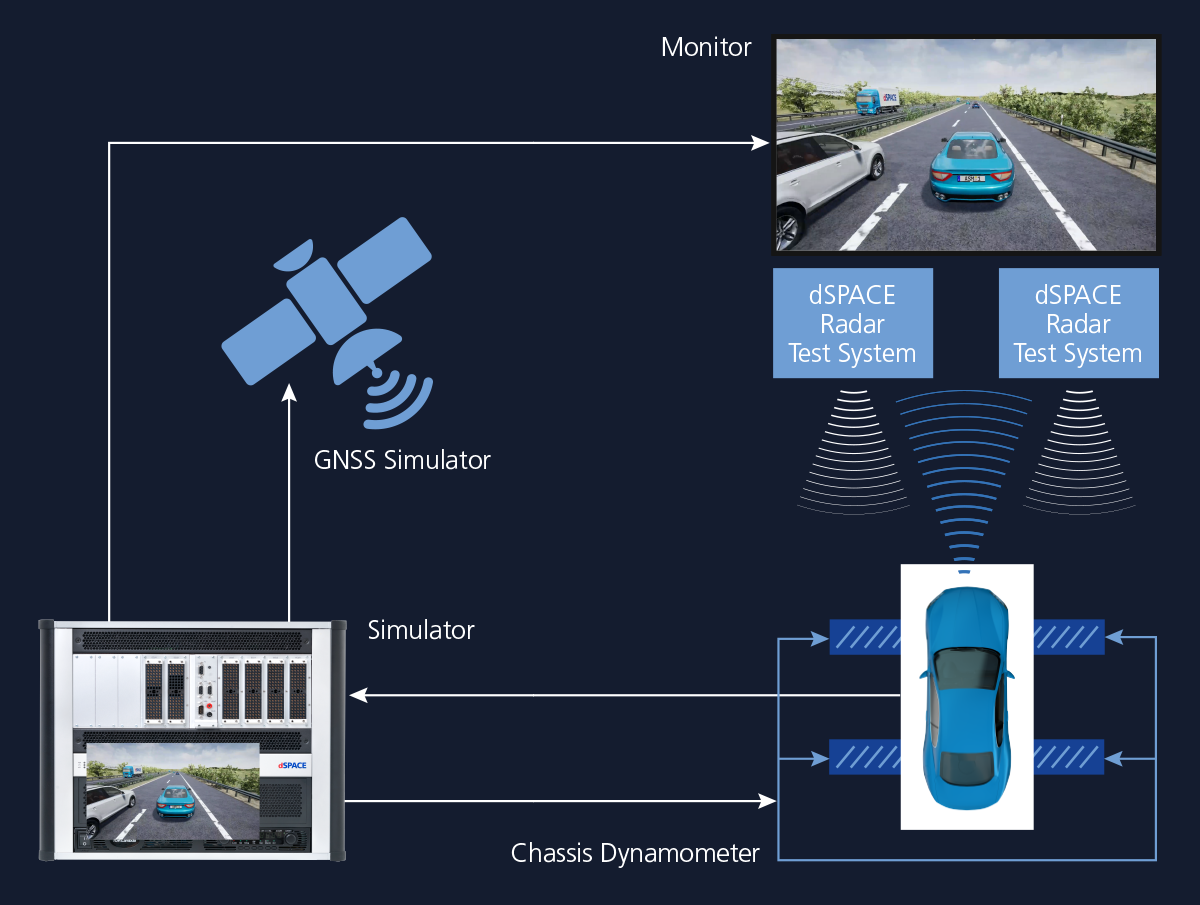
这种尺寸的VIL测试台架很复杂,它由大量的不同组件组成,需要高精度同步协作。在寻找合适的解决方案供应商时,dSPACE和CATARC在X在环仿真领域多年的开发和验证经验受到一汽红旗的青睐。他们携手为一汽红旗开发了定制VIL仿真系统。该系统包括dSPACE成熟可靠的仿真解决方案和德国测试台架专家Dürr的底盘测功机。在SCALEXIO系统上,使用汽车仿真模型(ASM)工具套件中的模型实时仿真虚拟汽车环境。SCALEXIO仿真器连接下列仿真组件,作为虚拟世界中的车辆传感器的物理变量,并将其无线输出:
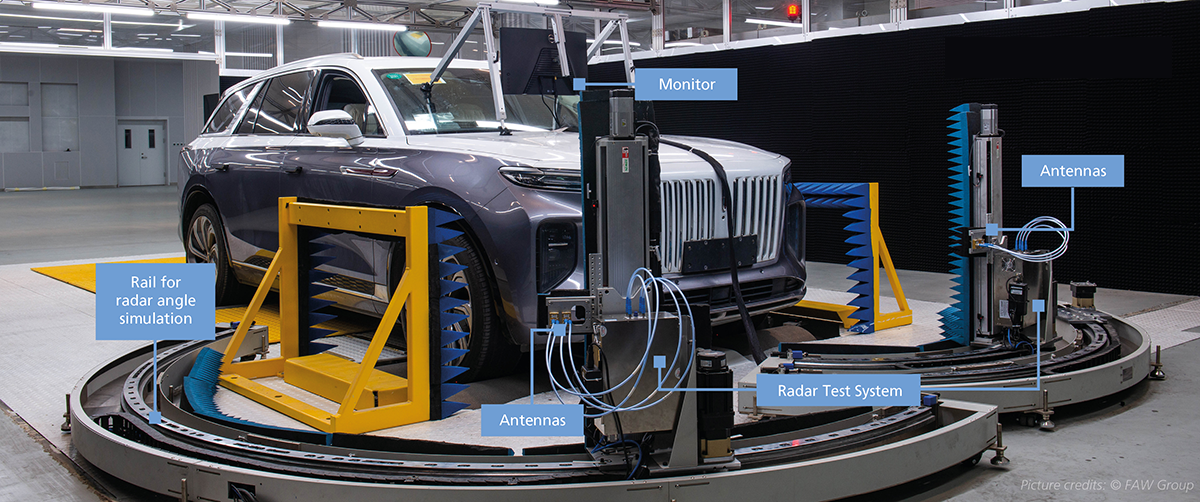
- 两个dSPACE汽车雷达测试系统(DARTS)9040-G,用于激发雷达传感器
- 一个显示屏,通过dSPACE动画软件提供图像内容。内容由摄像头传感器捕捉和评估。
- 一个全球卫星导航系统(GNSS)仿真器,用于导航系统定位
轨道上装有两个DARTS,允许在动态交通场景中对雷达目标进行角度仿真。混合路面曲线底盘测功机仿真道路。它还可以让前轴转向,以便测试侧向作用辅助系统。dSPACE已经与Dürr携手,制定了有效的解决方案来将仿真器与底盘测功机相结合,因此,可以使用在技术上成熟的概念。
VIL测试系统有什么作用?
车辆在环(VIL)仿真系统用于综合测试自动驾驶车辆。它被成功用于辅助驾驶系统的功能验证,例如:
- 自适应巡航控制(ACC)
- 自动紧急制动(AEB)
- 交通标志识别(TSR)
- 车道保持辅助(LKA)
- 自适应灯光控制(ALC)
- 交通堵塞辅助(TJA)
- 高速公路辅助(HWA)
它还为智能自动驾驶系统的验证提供了坚实的保障。利用VIL测试系统,一汽红旗实现了它的目标:为实车创建虚拟动态测试场景,在整车层面完成智能驾驶系统功能集成的确认和验证。借助ASM中可用的选项,可以不断扩充测试场景。所有测试都可以自动、重复执行,而且通过参数变化增加测试数量。

日常VIL测试
该测试在不同的开发阶段为一汽红旗提供支持。它适合任何需要整车测试的情况。它可以用于车辆的深度测试以及的最终检验,支持认证过程。因此,VIL试验台为高效地将多功能的自动驾驶新车推向市场做出了重大贡献。
Qu Jindai,一汽集团
dSPACE MAGAZINE, PUBLISHED JUNE 2022