通过数据回放测试验证感知和传感器融合软件功能以及虚拟ECU

- 使用记录的真实数据测试传感器融合和感知组件
- 使用Linux Docker container实现高性能、云技术解决方案
- 在多种框架(ROS、ADTF、AUTOSAR等)灵活集成
- 用于闭环和数据回放测试的互操作待测系统(SUT)接口
任务
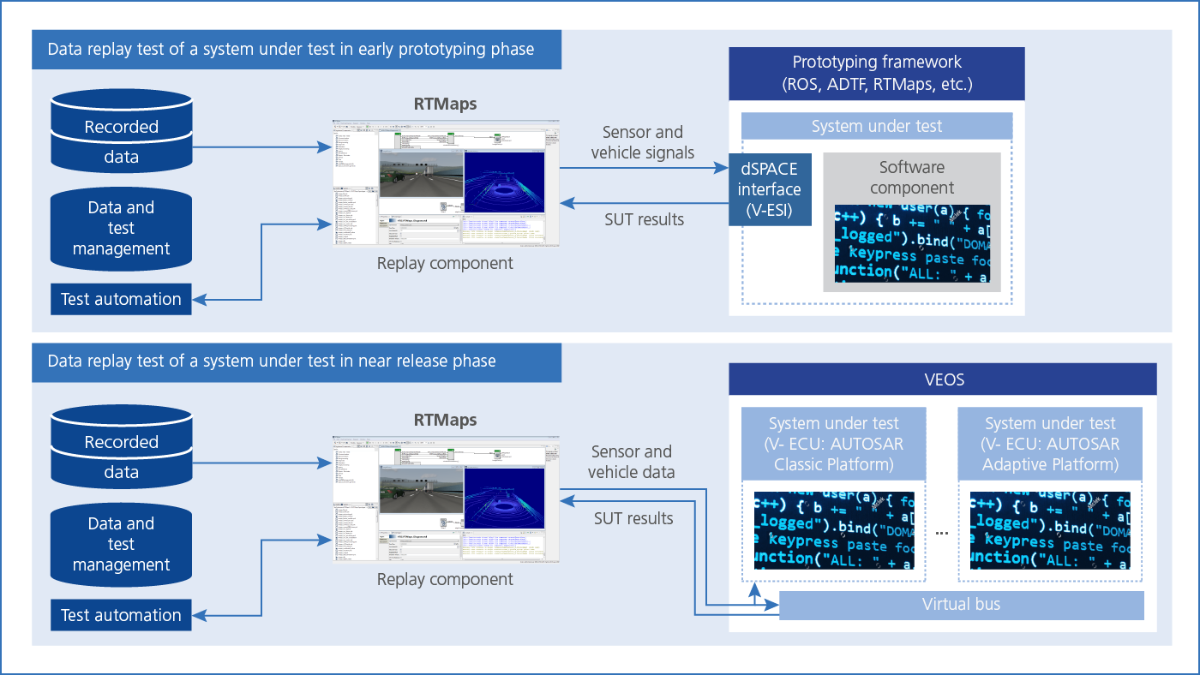
对不同的供应商进行基准测试,验证感知软件的功能,以及回归测试,这些都是必须在各个软件开发阶段大规模完成的任务,并且需要保证高效。无论是在使用ROS、RTMaps等多传感器开发框架的早期软件开发阶段,还是在实施基于AUTOSAR的生产就绪型虚拟ECU的后期阶段,我们都需要确定的数据回放解决方案,以对环境感知和传感器融合软件组件进行故障分析、调试和测试。
挑战
强大数据回放软件(SIL)解决方案必须克服诸多挑战,如调整记录数据以匹配被测系统(SUT)的接口,SUT在所有阶段的真实仿真以及所有相应的软件堆栈层,以及利用异构数据源和数据流向SUT提供确定性数据。同时,必须保证CPU/GPU资源的高模块性、可扩展性和效率。
解决方案
通过使用dSPACE数据回放软件解决方案,我们可以实现测试执行的可扩展性,并执行数千个测试用例。 所有使用的组件都通过Linux Docker打包,能够在任何基于云的测试框架中实现高性能和扩展性。
RTMaps是Intempora的多传感器应用程序开发框架,除了全面的二维、三维可视化功能外,还支持以多种文件格式(如MDF4、rosbags、DAT文件等)同步回放记录的数据流。这有利于调试和故障分析。
RTMaps可以尽可能快地重放数据,以确保比实时执行更快,并保证高性能而不会丢失数据。VEOS是dSPACE的集成与仿真平台,支持虚拟ECU仿真的所有相关标准,如AUTOSAR Adaptive以及AUTOSAR Classic。此外,VEOS支持CAN/CAN FD和以太网等总线的真实仿真,因此能够在目标部署之前对包括安全功能在内的整个软件堆栈进行高精度测试。
所有被测系统(SUT)接口都可以进行闭环测试和数据回放测试。数据回放软件(SIL)解决方案和硬件(HIL)解决方案之间的无缝过渡也得到了保证,因为所有接口和软件组件在软件(VEOS)和硬件(SCALEXIO)平台上都是可复用的。
推动创新进程。我们始终在技术开发的最前沿。
欢迎订阅我们简讯,了解我们的专业技术以及产品。希望我们的成功案例能够对您有所帮助。快速了解仿真和验证的最新信息。欢迎订阅/管理dSPACE简讯和dSPACE航空速报。