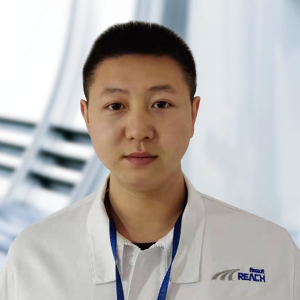
AURLION은 고품질 시각화를 제공하며 사실적인 센서 데이터를 계산하여 인식 및 주행 기능을 테스트하고 검증합니다.
유연한 사용
HIL, SIL 및 클라우드 시나리오에서 ADAS/AD 인식 및 주행 기능을 테스트하고 검증합니다.
무료 실측 데이터
인식 알고리즘의 자동 테스트 및 검증을 위해 완벽한 픽셀 단위 실측 데이터를 제공합니다.
센서 시뮬레이션
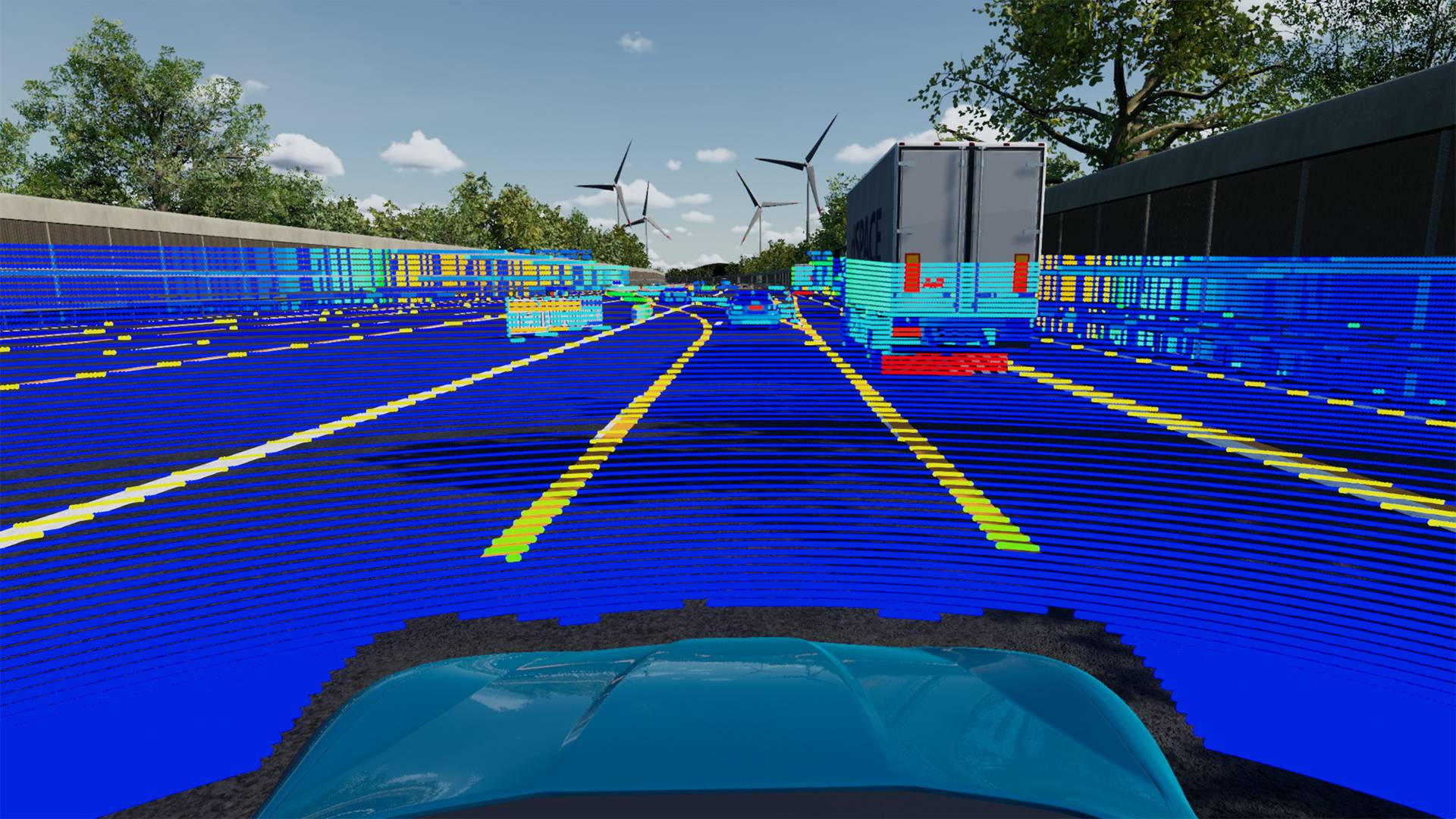
카메라, 레이더 및 라이다 센서의 매우 사실적이고 결정론적인 시뮬레이션.
실제 환경
OpenDrive 및 ModelDesk를 기반으로 3D 도로 및 환경 자동 생성.
AURELION이란?
AURLION은 센서 시뮬레이션 및 시각화를 위한 유연한 소프트웨어 솔루션을 제공합니다. 이를 통해 인식 및 주행 기능의 개발, 테스트 및 검증을 위한 프로세스에 사실적인 센서 데이터를 통합할 수 있습니다. 예를 들어 HIL(Hardware-in-the-Loop), SIL(Software-in-the-Loop) 및 VIL(Vehicle-in-the-Loop)과 같은 다양한 개발 단계에서 동일한 모델을 사용할 수 있습니다.
- dSPACE 시뮬레이션 도구에 고도로 통합되어 있어 AURELION을 빠르고 쉽게 통합할 수 있습니다.
- 당사의 센서 시뮬레이션 모델을 통해 실시간 요구 사항을 충족하면서 최고의 품질을 얻을 수 있습니다.
- 맞춤형 센서 모델을 통합하는 개방형 인터페이스는 시뮬레이션을 더욱 현실에 가깝게 만듭니다.
- 타사 시뮬레이션에 AURELION을 유연하게 통합하여 당사의 센서 시뮬레이션을 사용자 환경으로 가져옵니다.
AURELION 응용 분야
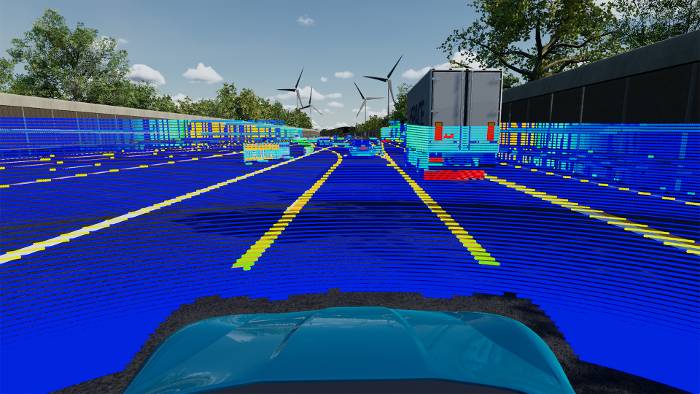
AURELION은 광범위한 사용 사례와 구성에 적합합니다. 예를 들어 HIL 테스트, SIL 테스트 및 VIL(Vehicle-in-the-Loop)을 비롯해 클라우드에서의 병렬 검증과 같이 다양한 개발 단계에 걸쳐 사용할 수 있습니다.
응용 분야의 예:
- 자동차, 자율 주행 차량, ADAS
- 농업
- 오프 하이웨이
-
자동화 모바일 로봇










센서 시뮬레이션의 주요 이점
3D 렌더링 엔진, 고정밀 dSPACE 시뮬레이션 모델, 실감 3D 자산 및 고해상도 자료 정보 등 여러 기능을 갖추고 있어, 다양한 날씨와 조명 조건에서도 자동차 센서 및 환경을 정확하게 시뮬레이션할 수 있습니다.
센서 모델

카메라 센서 모델
일반 또는 어안 렌즈와 해당 센서 환경을 가진 카메라를 현실적으로 시뮬레이션.
- 고성능 그래픽, 조명 효과, 구성 가능한 실감 렌즈 프로필
- 이미지 수정 및 고장 삽입 옵션
- 원시 센서 데이터 출력 시 구성 가능한 컬러 필터
- 의미(Semantic) 기반 분할, 광학 흐름 및 2D 경계 상자와 같은 실측 정보를 사용하여 알고리즘을 테스트하고 검증합니다.


실측
컴퓨터 비전을 개발하고 테스트하기 위해서는 센서 데이터에 실측 정보를 추가해야 합니다. 한편으로는 인식 알고리즘의 자동 테스트에 사용되며 다른 한편으로는 신경망 훈련에도 사용할 수 있습니다. 실제 데이터의 실측 데이터와 비교할 때, AURELION은 픽셀 단위로 완벽한 다양한 실측 변형을 무료 생성합니다. 보행자, 자동차 및 교통 표지판과 같은 모든 범주에 대해.
- 카메라, 레이더 및 라이다에 사용할 수 있는 특수 실측 결과 출력
- 출력은 센서에 맞게 자동으로 매개변수화됩니다.
- 원시 센서 데이터 실측과 동기화하면 C API를 통해 쉽게 얻을 수 있습니다.

2D 경계 상자
2D 경계 상자는 카메라 센서에서 개체를 둘러싸는 2차원 상자입니다. 이는 인식 알고리즘이 해당 장면에서 사용 가능한 개체를 올바르게 식별하는지 자동으로 테스트하는 데 사용할 수 있습니다. 정보는 이진 데이터로 제공되므로 빌드 파이프라인에서 자동 테스트에 사용할 수 있습니다.
-
픽셀 단위로 완벽한 경계 상자를 제공하도록 카메라 센서에 맞게 매개변수화 됨
2차원 바운딩 박스 - 또한 모든 개체의 클래스 및 인스턴스에 대한 정보도 포함
- 필요한 개체 유형에 따라 필터링됨
- 가려진 영역을 통합하거나 폐기하도록 구성 가능

의미(Semantic) 기반 분할
AURELION에 포함된 이미지의 의미(Semantic)기반 분할은 이미지 영역에 픽셀 단위 주석을 제공합니다. 인공지능 테스트 및 교육, 특히 자율주행의 경우 ,이 정보를 사용하여 신경망은 어떤 패턴이나 질감이 객체의 의미 기반 등급에 속하는지 학습할 수 있습니다.
이후, 이러한 네트워크는 이미지 생성, 도메인 적응, 차선 감지 또는 주행 가능 영역 감지와 같은 다양한 사용 사례에 대해 구현될 수 있습니다.
- 사용자 정의 가능한 범주
- 카메라, 레이더, 라이다에서 동일한 범주
- 범주 ID 및 인스턴스 ID 출력

3D 환경

당사 소프트웨어를 사용하면 OpenScenario 및 OpenDrive와 같은 표준을 지원하여 3D 환경을 자동으로 생성할 수 있습니다. 이를 통해 시간과 노력을 절약하고 가장 중요한 것인 시뮬레이션에 집중할 수 있습니다.
- 당사는 사용자가 도로를 수정하고 환경에 3D 자산을 추가할 수 있는 도구를 제공합니다.
- 도로 및 지형은 OpenDrive 파일을 기반으로 자동 생성됩니다.
- 당사의 3D 자산 라이브러리에는 사실적인 센서 시뮬레이션을 위한 센서별 재료가 포함되어 있습니다.
- 빠른 시작을 위해, 도시 및 고속도로 지역에 걸쳐 다양한 고성능 환경을 제공합니다.

AURELION 관리자

AURELION 관리자를 사용하면 가상 센서를 매개변수화하여 에고 자동차의 3D 표현에 배치함으로써 센서 구성을 완벽하게 제어할 수 있습니다. 당사의 소프트웨어 솔루션을 사용하면 AURELION 인스턴스를 최적화하고 작업 흐름을 간소화할 수 있습니다.
- 사용자의 자동차 3D 모델을 AURELION으로 가져옵니다.
- 에고 자동차의 3D 모델에서 센서 인스턴스를 시각화합니다.
- 센서 배치에 대한 정확한 결정을 내립니다.
- 어떤 PC에서 어떤 센서를 계산할지 지정하여 부하를 분산합니다.
- 자동화 API를 사용하여 AURELION을 테스트 환경에 원활하게 통합합니다.
옵션 제품군





고객들의 사용 후기
The sensor-realistic simulation solution AURELION makes it possible to integrate realistic sensor data into the processes for developing, testing, and validating a wide range of perception and driving functions.

dSPACE 시뮬레이션 솔루션을 통해 테스트 센터에서 실제 차량의 센서 및 운전자 지원 시스템이 올바르게 작동하는지 효율적이고 안정적으로 확인할 수 있는 유연하게 구성 가능한 방법을 갖게 되었습니다.

AURELION의 사실적인 센서 시뮬레이션 덕분에 사각지대 정보 시스템(Blind Spot Information Systems) 개발 동안 공사 현장 상황이나 주변 건물로 인한 다중 경로 반사와 같은 일반적인 외부 영향뿐만 아니라 다양한 형태의 도시 교통 영향도 고려할 수 있었습니다.

시뮬레이션 및 검증에 대한 dSPACE의 솔루션 역량은 당사에 확신을 심어 주었으며 야심찬 자율주행 노면 청소차 프로젝트를 효율적으로 실행하는 데 도움이 되었습니다.

dSPACE의 사실적인 센서 시뮬레이션 모델을 사용하면 복잡한 3D 시나리오에서 원시 센서 데이터를 생성할 수 있습니다.

사실적인 센서 카메라 모델을 사용하여 매우 복잡한 테스트 작업을 가상으로 안정적으로 시뮬레이션할 수 있습니다.