RTI CAN MultiMessage 블록 세트
dSPACE 시스템과 CAN 통신 네트워크 결합용
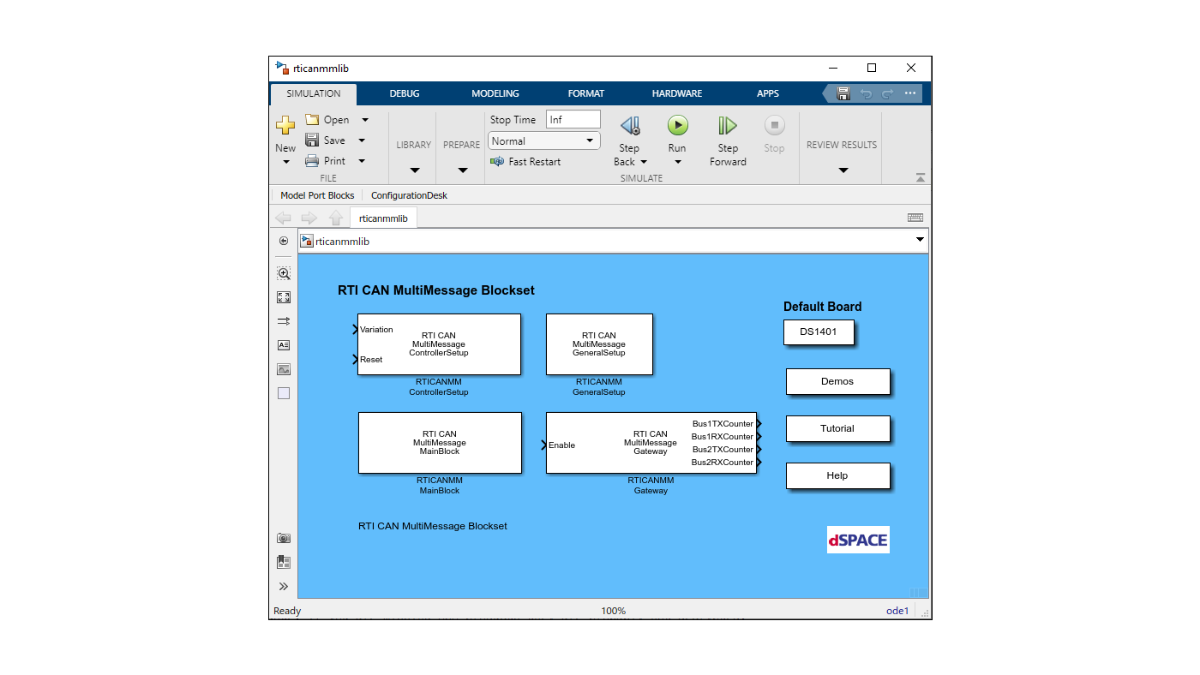
RTI CAN MultiMessage 블록 세트는 실시간 인터페이스의 확장이며 dSPACE 시스템과 CAN 통신 네트워크와 결합하고 이러한 CAN 네트워크를 구성하는 데 사용할 수 있습니다.
- Simulink ® 와 완전 통합
- 데이터베이스 파일 가져오기(DBC, FIBEX, AUTOSAR)
- J1939 지원, CAN FD 지원, 부분 네트워킹 지원

적용 분야
RTI CAN MultiMessage 블록 세트는 실시간 인터페이스(RTI)의 확장이며 dSPACE 시스템과 CAN 통신 네트워크와 결합하고 이러한 CAN 네트워크를 구성하는 데 사용할 수 있습니다. Simulink ® 와 완벽하게 통합되며 SCALEXIO 1) , MicroLabBox 및 MicroAutoBox II와 같은 다양한 dSPACE 제품을 지원합니다. RTI CAN MultiMessage 블록 세트는 상업용 및 오프로드 차량 영역에서 중요한 역할을 하는 J1939 프로토콜을 지원합니다.
파라미터 및 메시지
파라미터는 사용자 추적 파일을 통해 ControlDesk 및 AutomationDesk에서 직접 액세스할 수 있습니다. 또한 ControlDesk의 메시지 및 신호 조작을 포함하여 CAN 구성을 쉽게 처리할 수 있도록 Bus Navigator가 지원됩니다. 메시지 및 신호 레벨에 대한 유연한 조작을 통해 수많은 테스트 사례를 생성할 수 있습니다. 메시지에 있는 신호의 현재 값을 정의할 수 있습니다. 메시지는 자발적으로 전송될 수 있으며(킥아웃) 미리 정의된 메시지 전송을 조정할 수 있습니다. 또한 메시지 또는 신호 조작 없이 게이트웨이 블록을 통해 두 개의 CAN 버스 간에 단방향 또는 양방향으로 직접 전송할 수 있습니다. 메시지 전송 및 신호 조작 옵션은 런타임 중에 변경될 수 있습니다.
주요 장점
RTI CAN MultiMessage 블록 세트를 사용하면 단일 Simulink ® 블록에서 매우 많은 수의 CAN 메시지를 제어, 구성 및 조작할 수 있습니다. CAN 설명은 데이터베이스 컨테이너(DBC), 필드 버스 교환 형식(FIBEX) 또는 AUTOSAR XML 파일(ARXML)과 같은 통신 매트릭스 설명 파일에서 쉽게 읽을 수 있습니다. J1939 및 CAN FD(Flexible Data Rate) 프로토콜도 지원됩니다. 이러한 기능은 RTI CAN MultiMessage 블록 세트를 복잡한 CAN 설정을 관리하기 위한 시간 효율적이고 비용 효율적인 솔루션으로 만듭니다.
1) RTI CAN MultiMessage 블록 세트는 2024년 11월 15일(수명 종료일)부터 SCALEXIO를 더 이상 지원하지 않습니다. 이러한 블록 세트는 MicroAutoBox II 및 MicroLabBox와 같은 다른 플랫폼은 계속 지원합니다.
2023년 5월 15일까지 SCALEXIO 플랫폼용 제품을 구입할 수 있습니다. 2024년 11월 15일까지 소프트웨어 유지 관리 서비스 계약을 체결한 고객에게 RTI CAN MultiMessage 블록 세트의 새로운 릴리스(버전)가 제공될 예정입니다. dSPACE Release 2024-B는 이 블록 세트와 SCALEXIO의 조합을 지원하는 마지막 버전이 될 것입니다.
RTI CAN MultiMessage 블록 세트에서 다루는 적용 사례는 여러 이점을 제공하는 후속 제품인 버스 관리자에서 이미 지원되고 있습니다. 마이그레이션 지원 정보 및 도구는 당사 웹사이트에서 사용할 수 있습니다(예: 마이그레이션 스크립트).
| 기능 | 설명 |
|---|---|
| 일반 |
|
| 초기화 및 구성 |
|
| 신호 및 메시지 처리 |
|
| 인터럽트 |
|
| J1939 지원 |
|
| AUTOSAR 기능 지원 |
|
혁신을 추진하세요. 항상 기술 개발의 동향을 주시해야 합니다.
저희 전문 지식 서비스에 가입하세요. dSPACE의 성공적인 프로젝트 사례를 확인해 보세요. 시뮬레이션 및 검증에 대한 최신 정보를 받아보세요. 지금 바로 dSPACE 다이렉트(뉴스레터)를 구독하세요.