To ensure the suitability for everyday use and the safety of systems for autonomous driving despite the ever-increasing complexity of technologies used, the systems must be tested well before they are put into operation. Using the dSPACE and understand.ai solution for generating simulation scenarios, thousands of tests of safety-critical driving scenarios with special hardware and software can be performed by simulation.
With an innovative method based on artificial intelligence (AI), dSPACE and understand.ai offer a new service for generating scenarios from real measured raw data. Compared to classically generated object lists, which are calculated in real time, or online, in the vehicle, the subsequent scenario generation from raw data is not subject to any restrictions in terms of computing capacity. This avoids imperfections caused by incorrectly detected or undetected objects (false positives or false negatives, respectively) in the database. To cover as many different road traffic situations as possible, many factors are tested virtually before a physical prototype is available. This is done with the help of test scenarios, which are used in numerous tests and in different variants to obtain a meaningful result. However, this requires realistic scenarios. Since these scenarios are subject to special requirements, expert scenario generation is essential: The scenarios must reflect situations in many different real-world environments. In addition to a high variance of variables, such as weather and traffic density, a balanced mix of both critical and non-critical situations is crucial.
From the road to the lab – with test scenarios using real data
Analyzing Real Situations and Validating Autonomous Driving
To meet customer requirements, we differentiate between two scenario types: logical scenarios for the validation of autonomous driving and replay scenarios, which can be used to analyze faulty algorithms in simulations of real situations. Replay scenarios are an exact reconstruction of real situations based on recorded sensor data. Scenarios of this type cannot be adapted by parameterization, but they are excellent for simulating malfunctions and other real events in the laboratory. This way, failures of the driving function can be investigated and corrected in the lab under reproducible conditions. Furthermore, replay scenarios can be used for sensor model validation by comparing sensor data of a real scenario with simulated sensor data of the identical virtual scenario. In addition, there are logical scenarios in which the movements of the vehicles are abstracted and generalized to expose parameters of the scenario, which can then be adjusted to vary the scenario. These scenarios are used for the validation of ADAS/AD algorithms using scenario-based testing. Generated scenarios offer the great advantage that critical situations, such as accidents, can be simulated and run as often as required. This allows users to determine exactly those parameters that represent the challenges for the ADAS/AD algorithm.
Generating Scenarios
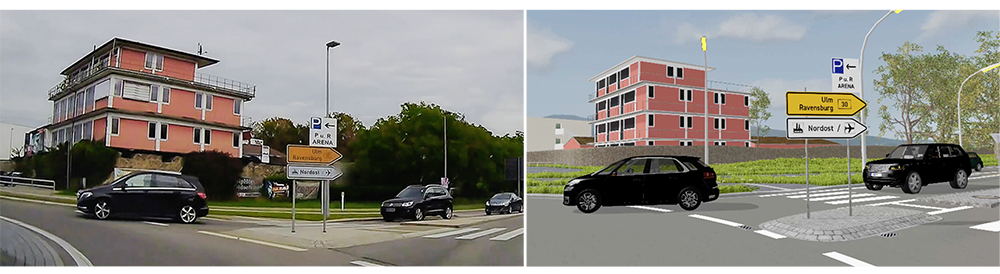
Before scenarios can be used in simulation and testing, they must be generated. There are different approaches to scenario generation. The example in this article will first explain the generation based on measurement data. Video recordings, lidar point clouds, and vehicle bus data are used for this. They can be recorded with special data logging hardware, such as dSPACE AUTERA. The realism of a scenario generated this way increases with the quantity and quality of the available data. A combination of different algorithms enables a semantically correct replication of the real scenario, including the motion profiles of all road users as well as the road and a 3-D scene that reflects all essential elements of the static environment. First, relevant information about the road and its surroundings as well as the trajectories of the road users are extracted from the raw data by means of AI-supported methods. The special quality assurance method of understand.ai ensures that the ground truth that is generated guarantees the semantic consistency of the generated scenarios. The extracted data is then converted into simulable (replay and logical) scenarios for the dSPACE simulation environment and into scenario descriptions based on the OpenDRIVE® and OpenSCENARIO® standards. The generated scenarios can therefore be immediately used for a wide range of tests, because in addition to the road description and the description of the movement profiles of the road users, a detailed 3-D scene is also generated, which enables physical sensor simulation. A scenario can also be created completely artificially and digitally on the computer using scenario editors, such as dSPACE ModelDesk. This means that users can design scenarios according to their own ideas and requirements. Although the design possibilities are in principle unlimited, diversity is ultimately limited by the requirements of the respective order or the creativity of the users. One advantage of this method is the possibility to construct scenarios that would be very difficult to re-record in the real world, for example, because they would be expensive or dangerous. Both for scenarios generated from measurement data and for artificially generated scenarios, it is possible to change parameters such as vehicle speed, weather, or the behavior of other simulated road users as required within the dSPACE solution by adjusting the corresponding parameters. The major advantage of scenario-based testing is its scalability depending on the available computing capacity. In addition, tests can be moved to the cloud, where the practically unlimited cloud capacities offer ample opportunities for the field of virtual validation and thus for the entire production chain.
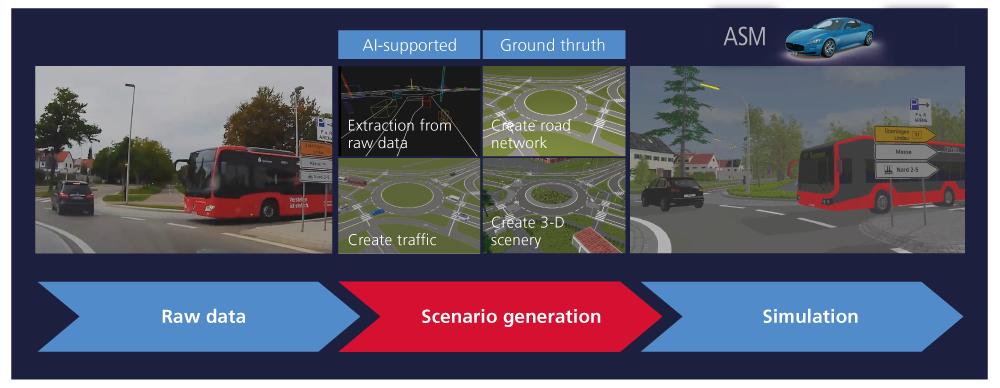
A scenario for the simulation is generated from the acquired measurement data using the solution from dSPACE and understand.ai.
New Solution Portfolio
The solution for scenario-based testing in combination with scenario generation from dSPACE and understand.ai helps customers overcome the obstacles on their path to a functioning prototype. The solution is underpinned by the many existing scenarios created by experienced developers and by the scenarios that can additionally be generated on the basis of real recorded sensor data or object lists. This allows for millions of test kilometers in a wide range of realistic and relevant scenarios.
Re-Simulation of Critical Edge Cases from a Real Test Drive Take the realism and complexity of the real world to the simulation:
- Use scenarios that reflect realistic traffic situations.
- Derive new test cases by adapting existing simulation scenarios.
- Use generated scenarios in the dSPACE simulation environment – immediately and without additional conversion effort (compatible with OpenDRIVE and OpenSCENARIO).
- Make the most of your data: Use the petabytes of material you have already recorded for the simulation.
dSPACE MAGAZINE, PUBLISHED NOVEMBER 2020