PC 및 클라우드 기반 시뮬레이션을 위한 dSPACE 솔루션
SIL 테스트용 dSPACE 솔루션을 사용하면 소프트웨어 개발 및 테스트 프로세스를 크게 가속화할 수 있습니다. 개별 사용 사례에 관계없이 강력한 솔루션의 이점을 활용하세요. 파워트레인 또는 제동 시스템과 같은 전통적인 자동차 애플리케이션부터 자율주행을 위한 e-드라이브 애플리케이션 및 기능에 이르기까지 혁신적인 dSPACE 솔루션을 신뢰할 수 있습니다.
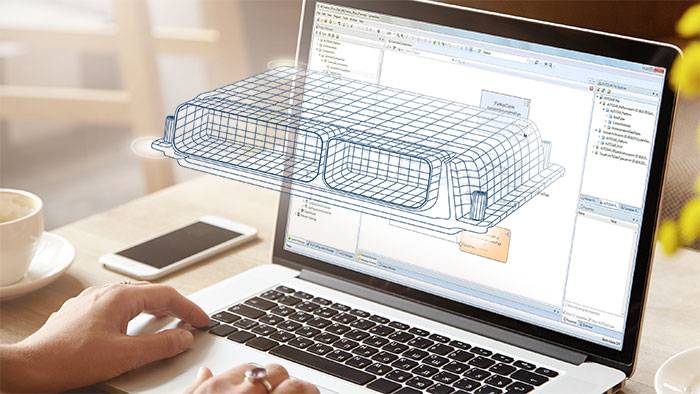
당사의 종단간 솔루션을 사용하여 테스트 중인 시스템으로 코드를 생성 및 가져와 가상 전자 제어 장치(V-ECU), 플랜트 모델 및 환경 모델과 같은 다른 시뮬레이션 부품에 연결할 수 있습니다. 당사의 시뮬레이션 플랫폼과 검증 솔루션을 사용하여 PC 또는 클라우드에서 모든 것을 함께 시뮬레이션하고 테스트할 수 있습니다. 이 도구 체인의 각 부분에 해당하는 dSPACE 솔루션을 사용할 수 있습니다. 타사 도구를 사용자의 요구에 최적화된 도구 체인에 통합할 수도 있습니다.
dSPACE - 시뮬레이션 및 검증 파트너.
당사 솔루션 하이라이트
- 초기 소프트웨어 테스트 및 테스트 준비 작업의 프론트로딩부터 전체 시스템의 포괄적인 검증에 이르기까지 여러 개발 단계와 다양한 애플리케이션 영역에 걸쳐 SIL 테스트를 위한 통합된 종단간 테스트 환경
- dSPACE에서 모든 부품을 구할 수 있지만 타사 요소와 함께 사용할 수도 있는 개방형 SIL 솔루션
- SIL과 HIL 간의 원활한 전환(예: SIL/HIL 테스트 재사용)
- 많은 고객 프로젝트에서 얻은 경험 - 당사는 고객의 요구에 맞는 SIL 시뮬레이션 환경을 구축하는 파트너입니다.
그 결과 혁신의 효율성, 생산성 및 신뢰성이 향상됩니다!

테스트 대상 시스템
개발된 소프트웨어는 모든 검증의 핵심입니다. 따라서 테스트 대상 시스템(SUT)이라고 합니다. dSPACE는 요구사항에 관계없이 시뮬레이션을 위한 SUT 준비 및 시뮬레이션 시스템 통합을 지원합니다.
당사의 SIL 솔루션을 사용하여 기존 ECU와 고성능 컴퓨터(HPC)의 가상화 및 통합을 수행할 수 있습니다. 또한 알고리즘 모델, 애플리케이션 계층의 V-ECU 또는 기본 소프트웨어가 포함된 V-ECU 등 모든 수준에서 V-ECU를 지원합니다.
dSPACE 또는 타사 도구를 사용하여 SUT를 생성한 다음 예를 들어 FMU(Functional Mock-up Unit)로 통합할 수 있습니다.

시뮬레이션 모델(플랜트/환경/레스트버스)
플랜트, 환경, 레스트버스 모델은 테스트 대상 시스템에 현실적인 입력을 제공하여 매우 현실적인 테스트를 달성합니다.
dSPACE는 연소 엔진, 차량 동역학, 전기 부품, 센서, 교통 환경 등 광범위한 응용 분야를 위한 포괄적인 시뮬레이션 모델을 제공합니다. 물론 기존 모델을 사용할 수도 있습니다.

시뮬레이션 및 통합 플랫폼
시뮬레이션 및 통합 플랫폼에서는 시뮬레이션 모델, 레스트버스 시뮬레이션, 테스트 대상 시스템과 같은 시뮬레이션 시스템의 모든 부분이 함께 실행됩니다.
dSPACE는 Linux 또는 Windows와 같은 다양한 운영체제에서 사용할 수 있는 확장 가능한 플랫폼을 제공하며, 모든 종류의 모델, 가상 ECU 및 타사 구성 요소를 통합할 수 있도록 개방되어 있습니다.

검증 솔루션
dSPACE 검증 소프트웨어를 사용하면 요구 사항 기반 테스트 또는 시나리오 기반 테스트와 같은 테스트 방법에 상관 없이 테스트를 계획, 실행 및 자동화할 수 있습니다. 필요에 따라 단일 테스트를 실행하거나 클라우드에서 병렬로 테스트 캠페인을 실시할 수 있습니다.
dSPACE에서 모든 테스트 도구를 구할 수 있지만 타사 도구를 통합할 수도 있습니다.



가상 ECU

가상 ECU(V-ECU)는 시뮬레이션에서 실제 ECU를 대신하는 소프트웨어입니다. 단순한 Simulink®/Stateflow® 모델만 사용하는 소프트 ECU와는 달리 V-ECU는 실제 생산 코드를 포함하고 있습니다. V-ECU는 코드로만 구성되어 있으며 다른 특수한 하드웨어가 필요하지 않습니다. SIL 시나리오에서 V-ECU는 실제 ECU 또는 컨트롤러 모델 대신에 사용됩니다.
- V-ECU는 어디에 사용되느냐에 따라 서로 다른 수준으로 추출될 수 있습니다.
- 애플리케이션 수준에서의 V-ECU는 애플리케이션 소프트웨어, 운영 체제, RTE의 일부분, 그리고 dSPACE가 보통 제공하는 기본 소프트웨어의 필수 부분을 포함하고 있습니다.
- 또한 V-ECU는 애플리케이션 소프트웨어 및 Dem과 NvM, COM과 같은 생산 기본 소프트웨어를 포함할 수 있습니다.
- V-ECU는 마이크로컨트롤러 추출 레이어(Microcontroller Abstraction Layer, MCAL)을 위한 모듈을 제외한 전체 애플리케이션 소프트웨어 및 하드웨어 비의존적 기본 소프트웨어를 포함할 수 있습니다.

- 용도, 프로젝트 요구 사항 및 AUTOSAR를 기반으로 한 개발인지 여부에 따라 V-ECU를 생성하는 방법은 다양합니다:
- 단일 컴포넌트에 대해서만 작업하는 기능 및 소프트웨어 개발자는 Simulink 또는 TargetLink를 통해 직접 V-ECU를 생성할 수 있습니다. 이를 통해 ECU 소프트웨어의 애플리케이션 레이어 일부분만 포함하는 단순 V-ECU가 생성됩니다. 이러한 V-ECU는 기본 기능 테스트를 가능하게 합니다.
- 더욱 복잡한 기능 네트워크를 테스트하고자 하는 소프트웨어 통합자는 소프트웨어 컴포넌트나 기능, SystemDest의 다양한 소스에서 추출한 비AUTOSAR 코드를 조합하여 ECU 소프트웨어 아키텍처를 생성할 수 있습니다. 그리고 나서 SystemDesk V-ECU 생성 모듈을 사용하여 완전한 V-ECU를 생성할 수 있습니다. 여기에는 런타임 환경(Run-time Environment, RTE)를 비롯하여, 필요 시 애플리케이션 레이어에 더해 기본 소프트웨어가 포함됩니다. V-ECU는 VEOS를 통한 PC기반 시뮬레이션을 사용합니다.
자동차 표준 지원을 통한 다재다능성
VEOS는 다양한 자동차 표준을 지원하므로 기존 툴 체인에 손쉽게 통합될 수 있습니다. 그러므로 VEOS를 신속 제어 프로토타입 또는 HIL 도구 체인에 추가하여 XCP XIL API PC 기반 시뮬레이션을 수행할 때 계속해서 기존 도구를 유지할 수 있습니다. dSPACE 소프트웨어와 하드웨어를 사용함으로써 신규 프로젝트 및 도전 과제에 대해 높은 유연성과 투자 비용 보호 효과를 볼 수 있습니다.
기능성 모형 인터페이스(FMI)
기능성 모형 인터페이스(Functional Mock-up Interface, FMI)는 다양한 도구 제공업체를 통해 제공된 발전 모델의 교환 및 통함을 위한 개방형 표준입니다. dSPACE는 PLM 개방 코덱스(Codex of PLM Openness)에 서명했으며 ProSTEP 스마트 시스템 엔지니어링(ProSTEP Smart Systems Engineering) 프로젝트, FMI 표준을 추가 개발하기 위한 모델리카 협회(Modelica Association) FMI 프로젝트, 시스템 구조를 위한 모델리카 협회(Modelica Association) 프로젝트, 가상 시스템 디자인(Virtual System Design, SSP)을 위한 컴포넌트 파라미터화 프로젝트에서 활동하고 있습니다.