LiDARモジュール
LiDARセンサの現実的なシミュレーション
数学的に公式化された物理法則に基づくLiDARフロントエンドおよびセンサ環境のシミュレーション。LiDARデータをLAWまたはポイントクラウド形式で処理チェーンに挿入することができます。
The Sensor Simulation products based on MotionDesk can no longer be purchased.
Instead, we offer our new generation of visualization and sensor simulation software: AURELION.
For more information on the product life cycle and the dSPACE product life cycle model in general, please refer to our website.
-
SensorSim 1.1
より現実的なセンサシミュレーションとパフォーマンスの向上
-
AI-in-the-Loop
現実に即したセンサシミュレーションによりAIベースの自動運転車両を検証する新しいテストシステムを発表
詳細
-
センサシミュレーション自動運転機能の開発における重要な機能
このオンラインセミナーでは、グラウンドトゥルースセンサモデルから、GPUベースの物理センサモデルを使用した生データのシミュレーションに至るまで、dSPACEが提供するセンサシミュレーション向けのさまざまなソリューションを紹介します。

適用分野
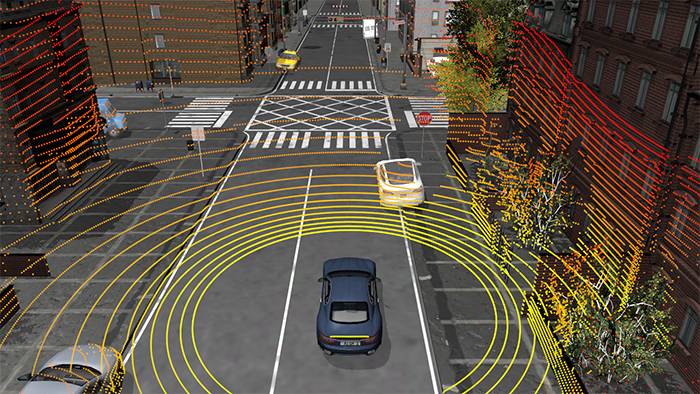
LiDARモジュール – センサシミュレーションの不可欠な要素 – センサ(レーザーおよび光検出器)の設計原理に基づくLiDARセンサシミュレーションが可能。このモジュールは、LiDARセンサの物理ベースのシミュレーションを提供し、さまざまな設定オプションを利用することができます。この環境シミュレーションは、レイトレーシングテクノロジに基づいています。さらに、APIを使用してデータ処理アルゴリズムのためにLiDARシミュレーションの機能を拡張し、カスタムセンサモデルを含めることができます。ポイントクラウドの各ポイントで、面法線ベクトル、方位角、仰角、距離、反射率、相対速度、マテリアルID、および屈折力などのさまざまな値が計算されます。さらに、スキャニングセンサの光線クロノロジをシミュレートし、設定することができます。複数のエコー(半透明物質の透過などから)も考慮されます。
要素と特徴
- 環境モデル計算のためのリアルタイム対応のレイトレーシング
- 複数のエコーを考慮
- フラッシュベースおよびスキャニングセンサのサポート
- センサ固有のGUIを使用するMotionDeskを介した基本的なセンサの設定
- センサの測位および方向
- 視野
- シミュレートされる光線の方位角、仰角、時間、および時系列の順序などのセンサ固有のプロパティ
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き