AURELIONは高品質のビジュアル表示を実現し、認知機能や運転機能のテストおよび妥当性確認向けの現実的なセンサデータを計算します。
柔軟に使用可能
ADAS/ADの認知機能や運転機能のテストや妥当性確認をHIL、SIL、クラウドのシナリオで実行
無料のグラウンドトゥルースデータ
1ピクセルの狂いもないグラウンドトゥルースデータにより、認知アルゴリズムの自動テストを実行し妥当性を確認。
センサシミュレーション
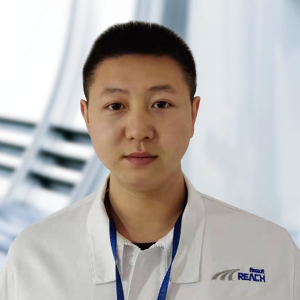
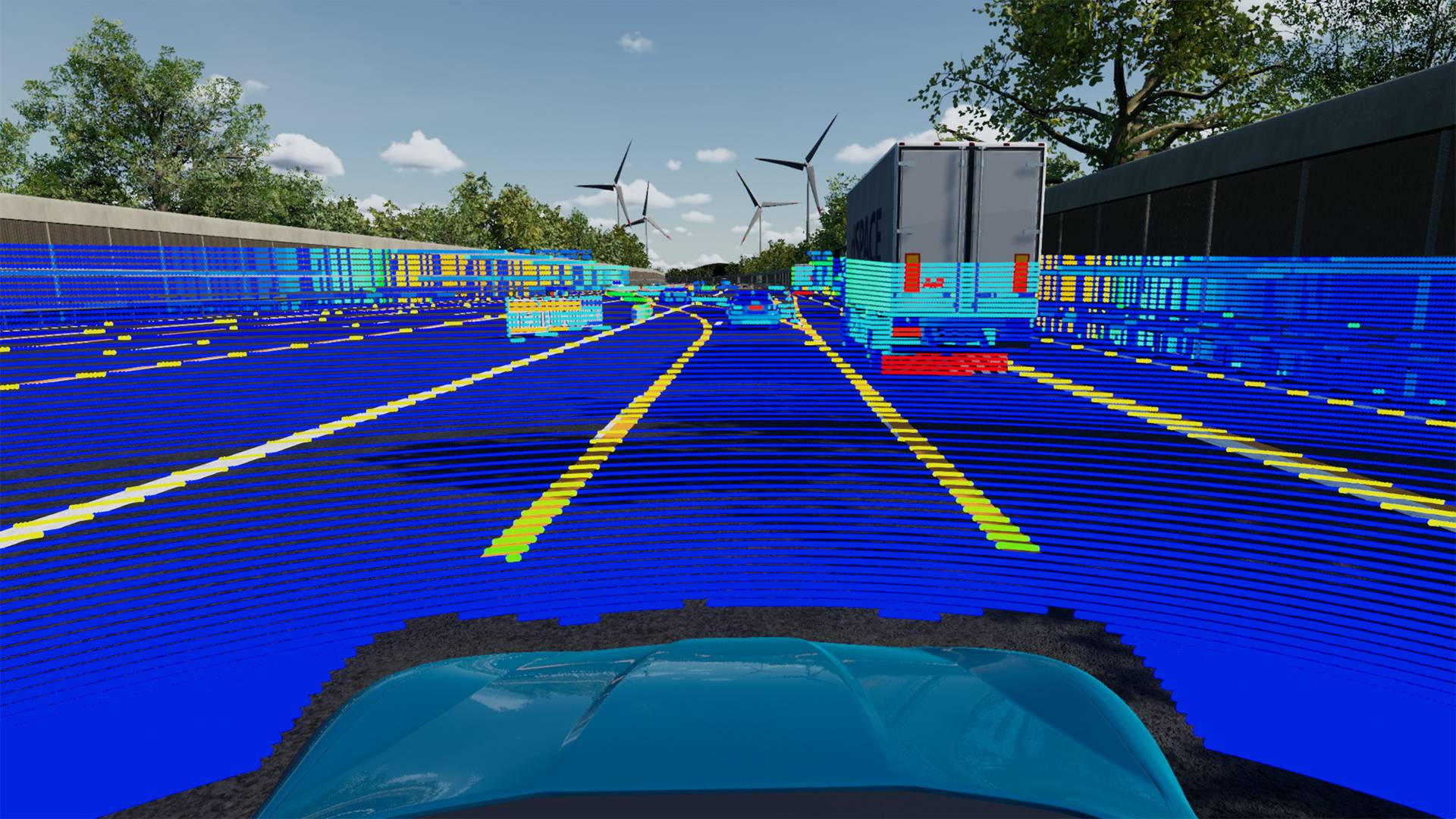
カメラ、レーダー、およびLiDARセンサの極めて現実的かつ常に安定したシミュレーション
現実的な環境
OpenDriveおよびModelDeskに基づいた3Dの道路や環境を自動的に生成
AURELIONとは
AURELIONは、センサのシミュレーションとビジュアル表示向けの柔軟なソフトウェアソリューションです。これにより、認知機能や運転機能の開発、テスト、および妥当性確認のプロセスに対応した現実的なセンサデータを統合することができます。また、HIL(Hardware-in-the-Loop)やSIL(Software-in-the-Loop)、VIL(Vehicle-in-the-Loop)など、開発プロセスのさまざまな段階で同じモデルを使用することができます。
- dSPACEのシミュレーションツールに高度に統合されたAURELIONは、すばやく容易に統合可能
- リアルタイム性に対応しつつ最高の品質を保証するセンサシミュレーションモデル
- カスタムセンサモデルを統合できるオープンなインターフェースにより、さらに現実に近いシミュレーションが実現
- AURELIONをサードパーティ製シミュレーションに柔軟に統合できるため、センサシミュレーションを自身の環境に容易に導入可能
AURELIONの適用分野
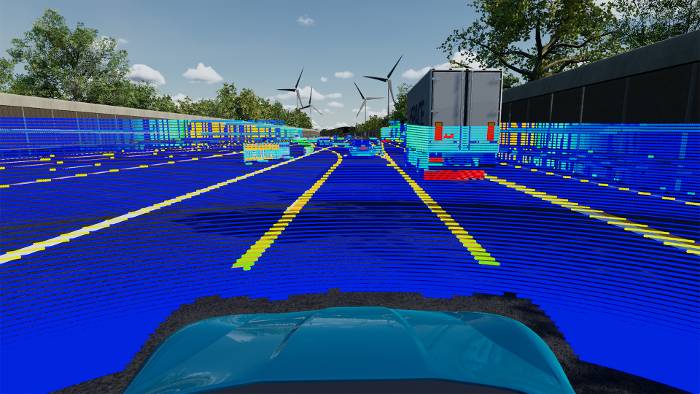
AURELIONは、幅広い使用事例や構成に適しています。たとえば、HIL(Hardware-in-the-Loop)テスト、SIL(Software-in-the-Loop)テスト、VIL(Vehicle-in-the-Loop)テスト、さらにはクラウド上の並列検証など、各開発フェーズを通して使用することができます。
適用分野の例:
- 自動車、自動運転車両、ADAS
- 農業
- オフハイウェイ
-
自律移動ロボット










センサシミュレーションの主な利用効果
3Dレンダリングエンジン、高精度のdSPACEシミュレーションモデル、リアルな3Dアセット、および高解像度の材料情報により、天候および光に関する各種条件で自動車のセンサと環境を正確にシミュレーションすることができます。
センサモデル

カメラセンサモデル
対応するセンサ環境を用いて、球面収差補正レンズおよび魚眼レンズ付きカメラをリアルにシミュレートします。
- 高画質のグラフィック、ライティングのエフェクト、およびリアルで設定可能なレンズプロファイル
- 画像修正および欠陥生成オプション
- センサの生データを出力するための設定可能なカラーフィルター
- セマンティックセグメンテーション、オプティカルフロー、2Dバウンディングボックスなどのグラウンドトゥルース情報を使用したアルゴリズムのテストおよび妥当性確認


グラウンドトゥルース
コンピュータビジョンを開発およびテストするには、センサデータにグラウンドトゥルース情報を追加する必要があります。これらは認知アルゴリズムの自動テストだけでなく、ニューラルネットワークのトレーニングにも使用することができます。実データから得たグラウンドトゥルースデータと比べ、AURELIONでは1ピクセルの狂いもないグラウンドトゥルースバリアントを無料で生成できます。また、歩行者、自動車、道路標識など、あらゆるカテゴリにも対応しています。
- カメラ、レーダー、およびLiDARに使用できる専用のグラウンドトゥルース出力
- センサに合わせて出力を自動的にパラメータ化
- C APIにより、センサの生データと同期化したグラウンドトゥルースを容易に取得

2Dバウンディングボックス
2Dバウンディングボックスは、カメラセンサにおいてオブジェクトの周りを取り囲む2次元のボックスです。これらを使用すると、認知アルゴリズムがシーン内のオブジェクトを正しく認識するかを自動的にテストできます。この情報はバイナリデータとして提供され、ビルドパイプラインでの自動テストに使用できるようになります。
-
カメラセンサが1ピクセルの狂いもなくバウンディングボックスを表示できるよう、パラメータ化を実行
- あらゆるオブジェクトのクラスやインスタンスの情報も提供
- 必要なオブジェクトのタイプでフィルタリング
- 不明瞭な領域を取り込む、または破棄するように設定可能

セマンティックセグメンテーション
AURELIONに画像を取り込んでセマンティックセグメンテーションを行うと、画像の各領域に対してピクセルレベルでアノテーションが行われます。特に自動運転向け人工知能のテストやトレーニングでは、この情報を利用することで、セマンティッククラスのオブジェクトに対するパターンやテクスチャの所属関係をニューラルネットワークに学習させることができます。
その後、そのようなネットワークを画像生成、ドメイン適応、車線検出、または運転可能エリア検出といった多様な事例に適用します。
- カテゴリのカスタマイズが可能
- カメラ、レーダー、およびLiDARでカテゴリを共有
- カテゴリIDやインスタンスIDを出力

3D環境


AURELION Manager

オプション製品





お客様の声
The sensor-realistic simulation solution AURELION makes it possible to integrate realistic sensor data into the processes for developing, testing, and validating a wide range of perception and driving functions.

当社では、柔軟に調整可能なdSPACEのシミュレーションソリューションを用いて、実車のセンサや運転支援システムの適切な動作をテストセンターで効率的かつ確実に確認しています。

AURELIONのセンサリアリスティックシミュレーションのおかげで、私たちはBSISを開発する際に、建設現場を取り巻く状況や周辺の建物による多重反射といった通常の外部からの影響だけでなく、極めて多様な都市交通から生じる各種の影響を考慮することができました

dSPACEの卓抜したシミュレーションおよび妥当性確認ソリューションは私たちを深く納得させ、自動運転型の路面清掃車という壮大なプロジェクトを実行に移すことを可能にしました。

dSPACEのセンサリアリスティックシミュレーションモデルを使用すると、複雑な3Dシナリオからセンサの生データを生成できます。

センサリアリスティックカメラモデルにより、極めて複雑なテスト作業を仮想環境で確実にシミュレートできます。