TargetLinkでは、Simulink®から直接、グラフィカルなモデルを高品質な量産コードに変換することができます。
コードの自動生成
TargetLinkが自動的に高品質のC/C++コードを生成するため、アプリケーションの開発に集中することができます。
自動車規格
TargetLinkがClassicおよびAdaptive AUTOSARを高度にサポート。
認証
TargetLinkは、機能安全規格であるISO 26262、ISO 25119およびIEC 61508の認証を取得しています。
開発者のニーズに適合
ソフトウェア開発者のニーズに合わせて構築されており、世界中の何百万台もの車両で実証済みです。
TargetLinkとは
TargetLinkは、MathWorks ® Simulink ® /Stateflow ® から直接電子制御ユニット(ECU)やドメインコントローラ向けの極めて効率的なCコードを生成するソフトウェアであり、組込み量産ソフトウェアおよびシステムのモデルベース開発に不可欠なツールです。
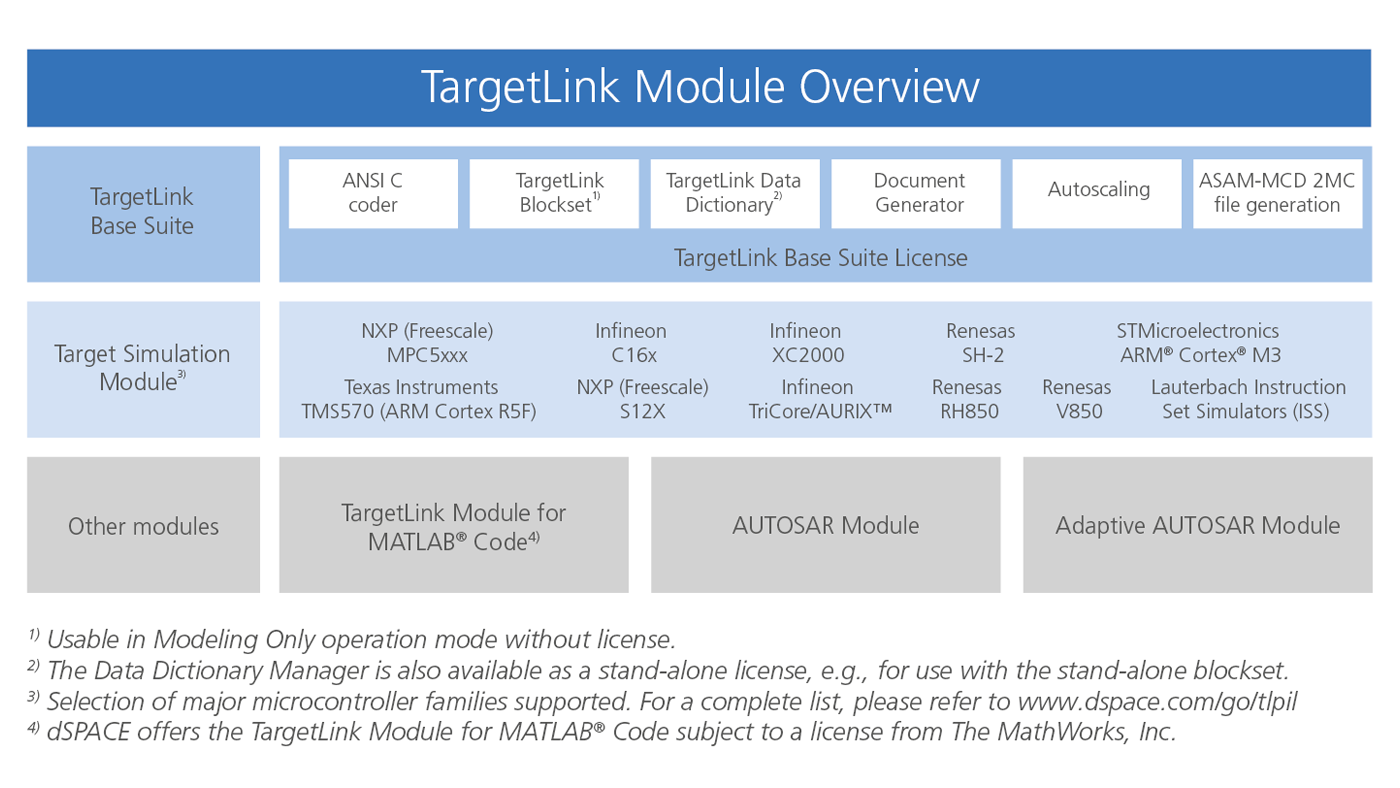
シンプルなANSI Cコードから、AUTOSARプラットフォームの固定小数点演算または浮動小数点演算向けに最適化されたコードまで、TargetLinkでは広範なCコード生成オプションを用意しています。TargetLinkでは、Adaptive AUTOSARをサポートすることにより、C++コードの生成をサポートしています。また、TargetLinkには、ソフトウェア設計機能以外にビルトインのコード最適化、シミュレーション、およびテスト機能が搭載されているため、生成された結果をすばやく検証し、最適化することができます。TargetLinkは他のdSPACEツールや他のベンダー製のツールとの相性もよく、これらを組み合わせることでTargetLinkエコシステムを構成しています。
適用分野
自動車業界やその他の分野のお客様がTargetLinkを使用すると、次のような用途に対応するECUおよびドメインコントローラの量産ソフトウェアを開発することができます。
- 電動化モビリティおよびElectric Drive
- 先進運転支援システム(ADAS)
- 高度に自動化された自動運転車両
- 快適性能用エレクトロニクス
その他多数
コードの自動生成

自動車規格

認証

開発者のニーズに適合

強力なパートナーツール

機能概要
| 特長 | 説明 | 利用効果 |
| コードの効率性 | Simulink®/Stateflow®から直接、効率的な固定小数点または浮動小数点量産コードを生成(MATLABコードもサポート、オプションモジュールを参照) | モデルとダイアグラムによる仕様書を効率的なCコードに直接変換 |
| コードの信頼性 | モデルからテスト済みCコードへの一貫性と決定性を備えた変換 | タイプミス、見落とし、誤解などによるエラーを防止 |
|
読みやすさ
|
簡潔かつ読みやすいコード | コードレビューが容易 |
| 自動スケーリング | 信号範囲の伝播のワーストケースに基づく高度なスケーリング、およびシミュレーションに基づくスケーリング | 長い時間を要する、エラーの起こりやすいスケーリングプロセスを短縮 |
| テストのメカニズム | 量産コードを仕様に対してテストするためのさまざまなテストレベル(MIL、SIL、PIL) | 初期段階で異常を発見 |
| インクリメンタルコード生成 | モジュール単位のコード生成(特定のサブシステム用など) | より高速なコード生成、承認済みコードを維持 |
| モデルリファレンス機能のサポート | モジュールまたはコンポーネント単位のモデル開発 | 大規模なチームによる分散開発を格段に容易化、大きなモデルを効率的に処理 |
| マルチレートコード | タスク間通信を備えたマルチレートシステムの完全なサポート | タスクをブロックレベルで定義可能 |
| TargetLink Data Dictionary | 変数、データ構造、スケーリング式、タスク、関数を扱うためのコンテナ | プロジェクトの計画と構造化を行うための複雑なデータ管理が可能 |
| 規格への準拠 | 関連規格に準拠(ASAM-MCD 2MC (ASAP2)、AUTOSAR、MISRAなど) | 保証された品質と相互運用性 |
| 適合ツール用データの生成 | 適合データを適合ツール用にASAM-MCD 2MC(ASAP2)ファイルとしてエクスポート | モデルと適合データとの間の完全な一貫性を維持する自動化された完全なプロセス |
| ドキュメント | モデルおよびコードドキュメントの自動生成 | 透過的で追跡可能なプロジェクト |
| AUTOSARソフトウェアコンポーネント(SWC)コンテナの交換 | TargetLinkおよびSystemDesk間のAUTOSAR SWCコンテナの交換 |
AUTOSARソフトウェア開発の安全で使いやすいラウンドトリップ。
適切なソフトウェア統合テストのためのSystemDeskシミュレーションへのアクセス。 |
| コンポーネントベース開発 | ポート、計測信号、および適合パラメータ用の革新的なインターフェースコンセプト | さまざまなプロジェクト間でのソフトウェアの再利用性の向上 |
| dSPACE VEOSとの接続 | TargetLinkからバーチャルECUをエクスポートし、他のバーチャルECUやControlDeskなどの標準dSPACEツールと組み合わせてVEOSで実行 | TargetLinkコードによる簡単なテストや試験 |
| FMIのサポート | Functional Mock-up Interface(FMI)規格をベースとしたTargetLinkモデルからのFunctional Mock-up Unit(FMU)のエクスポート | TargetLinkから生成したコードのサードパーティ製およびdSPACE製のオフラインシミュレータやリアルタイムシミュレータでの実行 |
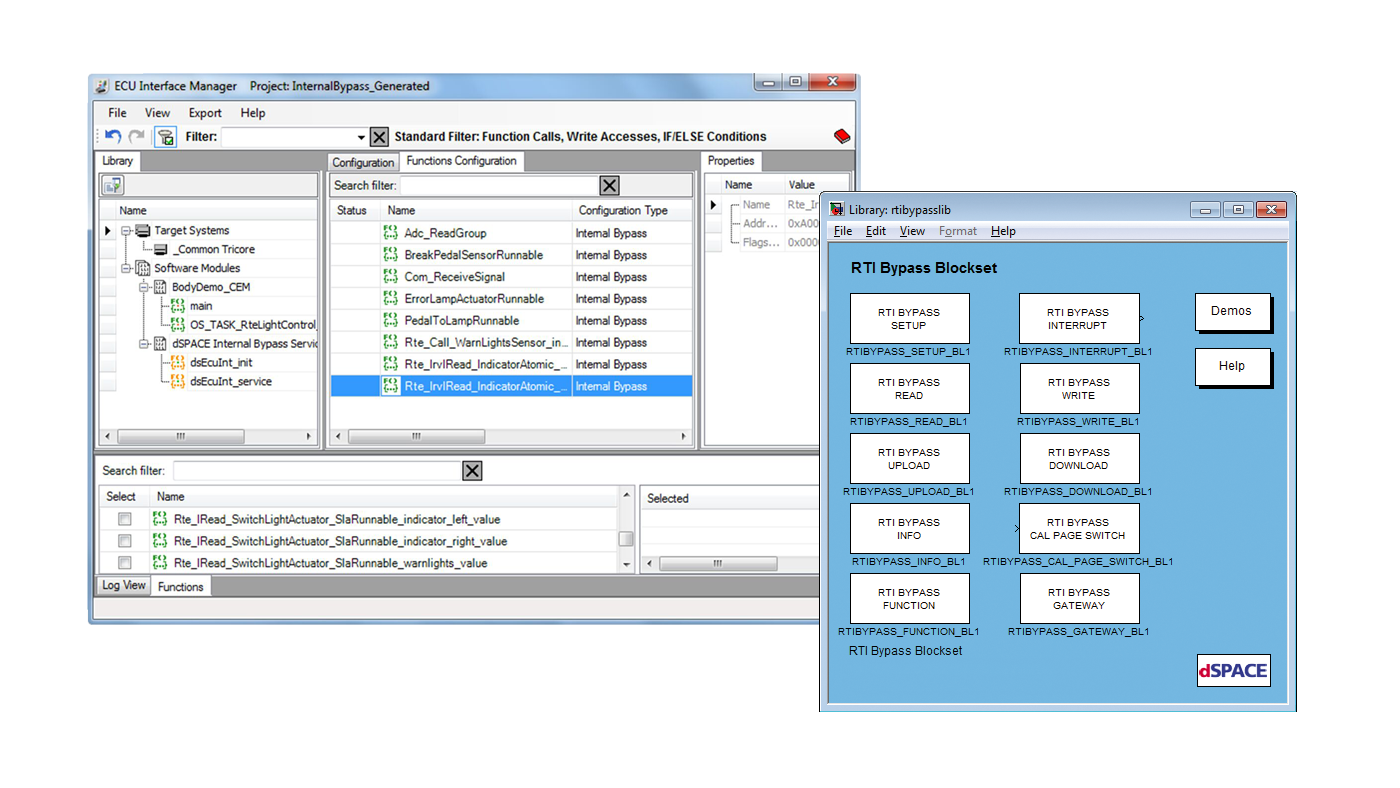
| オンターゲットバイパス処理 | 既存のECUに新しい機能を直接統合(TargetLinkおよびdSPACE ECUインターフェースソフトウェアを使用) |
プロトタイピングから量産へのシームレスな移行。
複雑なソフトウェア統合が不要。 |
必須/オプションのソフトウェア
| 必要なソフトウェア | 統合開発環境 |
|
| オペレーティングシステム | www.dspace.jp/goto.cfm/ja_0907 | |
| オプションのソフトウェア | PIL(Processor-in-the-Loop)テスト用コンパイラ |
ターゲットシミュレーションモジュールを使用したPIL(Processor-in-the-Loop)テスト向けのターゲット固有のコンパイラ
|
| オンターゲットバイパス処理用のツールチェーン |
|
|
| バーチャルECUの実行 | VEOS | |
|
dSPACEリアルタイムシステム2)およびTargetLinkを使用したシナリオのConfigurationDeskでのサポート
|
||
| システムアーキテクチャのモデリングとバーチャルECUの生成 | SystemDesk | |
|
MathWorks® Simulink®、Stateflow®および
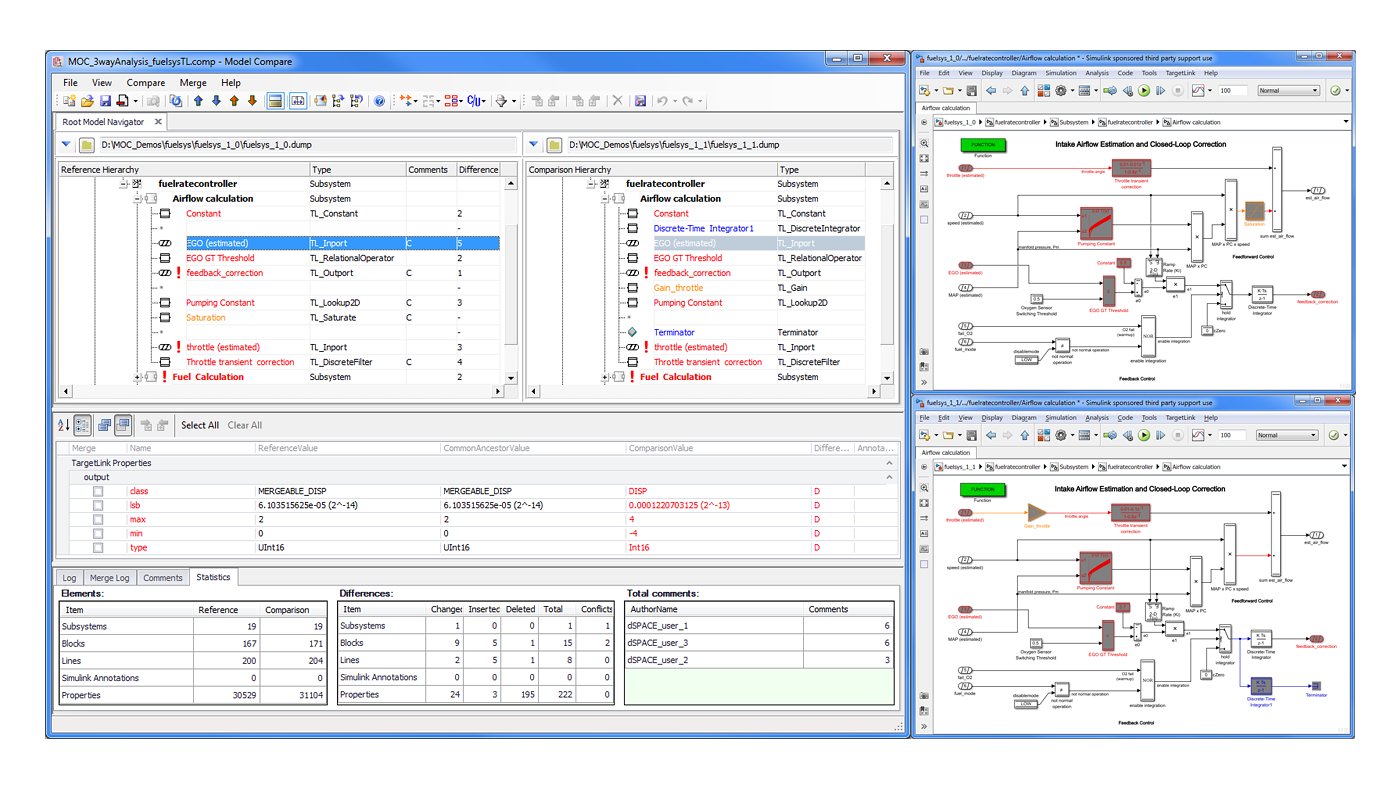
dSPACE TargetLinkモデルの比較 |
Model Compare | |
| 2つのバージョンのAUTOSARアーティファクトを比較 | dSPACE AUTOSAR Compare |
オプション製品





TargetLinkエンジニアリングサービス

TargetLink 2023-B
モデリングの向上とコード生成の効率化を実現する新機能および機能改善
- TargetLinkブロックライブラリにSOLE(Systems of Linear Equations)Solverブロックを追加
- Data Store ReadおよびData Store Writeブロックの変数を動的に選択可能
- 従来の初期化モードから簡易初期化モードへスムーズに移行可能
- C++構成要素の追加:列挙クラスデータタイプ、静的キャスト、およびモジュールレベルの名前空間
- テキストベースのDDファイルをDDJSONフォーマットで提供することにより、Gitなどのバージョン管理システムやModel-as-codeを用いたワークフローでDDファイルの操作性を改善