モデルベース開発によるADASシステムの開発スピードの向上
|
発表日: 2016年07月05日 |
これまで以上に複雑化しつつある電子システムを迅速に開発する方法とは
Kunal Patil博士、シニアアプリケーションエンジニア、dSPACE Inc.
車両システムの安全面を強化することが可能な先進運転支援システム(ADAS)には、交通事故件数を大幅に減少させる可能性があります。ADAS市場は、高速道路の運転用に設計された快適システムから、複雑な都市環境で機能するように設計された安全システムへと発展しています。ただし、これはシステムの複雑化にもつながります。
プロトタイプ車両だけで、複雑さを増す車両動作への制御介入の妥当性確認を確実に行うことは、不可能になっています。複雑さが増しているにもかかわらず、開発作業に遅れをとらないためには、開発の早期の段階で関連するテストをラボに持ち込んで、電子制御ユニット(ECU)の相互作用を自動的に評価する必要があります。
ラボにおける仮想テストドライブは、この課題に対する答えとなります。自動車業界では、ECUソフトウェアのモデルベース開発が増加しています。特に運転支援システムでこのアプローチを用いると、エンジニアはMIL(Model-in-the-Loop)シミュレーションによって非常に早期の段階からPC上で機能的コンセプトや要件の評価および妥当性確認を行ったり、SIL(Software-in-the-Loop)シミュレーションやHIL(Hardware-in-the-Loop)シミュレーションで構成されたソフトウェア開発プロセス全体にわたってテストライブラリを再利用したりすることができます。
ステアリング、ブレーキ、またはスロットル制御と相互作用する運転支援システムの場合、車両とその動的挙動の詳細なモデルや、道路、ドライバー、環境センサ、および周辺トラフィックをシミュレートするためのモデルが不可欠です。テストライブラリ、運転操作、およびプラントモデルのセットアップと検証を開発の早期の段階に移行することにより、貴重なHILテストの時間を節約することができます。この結果、MILまたはSILシミュレーション時に生成されたテスト結果の検証に限定して実際のHILテストを行うことができます。
ADAS開発用のdSPACEプラットフォーム
下の図は、ADAS開発用のdSPACEプラットフォームの概要を示しています。これはラピッドコントロールプロトタイピング、仮想検証、およびHIL(Hardware-in-the-Loop)シミュレーションという3本の柱を特徴としています。
dSPACEラピッドコントロールプロトタイピング(RCP)システムは、専用のツールとADASアプリケーション向けのプラットフォームを提供します。dSPACE RCPシステムを使用すると、手作業によるプログラミングなしで新たな制御方式の開発や最適化、テストを実際の環境で迅速に行うことができます。制御設計の際には、ADASのプロトタイプが実際のECUにように車両に統合され、車両のバスシステム(車両CANなど)と通信する必要があります。MicroAutoBox IIとAutoBoxは、コンパクトなプロトタイピングソリューションで、演算負荷の高い組込みソフトウェアの実行、および車両電装系への統合に適しています。
dSPACE VEOSでは、仮想検証が可能になっています。VEOSは、ホストPC上でのバーチャルECU(V-ECU)と環境モデルのCコードベースのシミュレーションのためのdSPACEソフトウェアです。VEOSは環境モデルを使用したクローズドループにおけるPCベースのオフラインシミュレーションにより、ECUソフトウェアのテストや妥当性確認をサポートします。仮想検証テクノロジを使用すると、ECUハードウェアをまだ入手できない場合でも、PC上でHIL(hardware-in-the-loop)のテストやシナリオを準備したり、V-ECUを使用したHILシミュレーションを行うことができます。
第3のプラットフォームであるHILシミュレーションについては、このブログの後半で詳しく説明します。
ラボでADAS機能をどのようにしてテストしますか。
この答えはHIL(Hardware-in-the-Loop)による最先端のテストです。この方法では、自車、周辺車両、静的オブジェクト、およびセンサの適切なプラントモデルによって環境をエミュレートすることができます。ADAS機能は電子制御ユニット(ECU)ネットワーク全体に分散されることが多いため、バーチャルビークル内にあるシステムの動作上の信頼性を保証するにはエンドツーエンドのテストが必要です。センサにも動的なプラントモデルを使用するHIL(Hardware-in-the-Loop)シミュレータでは一般的なコンポーネントテストや統合テストを行いますが、ADASアプリケーションにとって実際のセンサやアクチュエータを統合することは特に重要です。
HILテストは、リアルタイム対応の動的モデルを使用することより実現されます。ADAS開発の場合、物理システムと通信システムの動的挙動のモデリングははるかに複雑になります。ADAS機能は、トラフィック、道路条件、車両やインフラとの通信、およびレーダー、ライダー、GPS、カメラなどの信号インターフェースを含む車両とその環境の状態に依存しています。そのため、大幅に複雑化します。以下で説明する当社のASMモデルを使用すると、エンジニアはあらゆる現実的なテストシナリオをラボで再現することができます。
ASMが特別である理由
dSPACEのAutomotive Simulations Models(ASM)は、ADASの開発やテスト向けのトラフィックシミュレーションを含む、動的なプラントモデルを提供します。ASMは、自動車アプリケーションのリアルタイムシミュレーション用のオープンなSimulinkモデルです。ASMはモジュール型の構成であるため、車両バリアントや使用事例に対して異なるモデルライブラリを組み合わせることが可能です。ASMモデルはHILシミュレータ上で動作できるため、さまざまなADASテストを現実的に実行することができます。
ASM Traffic Libraryを使用して、ADASの幅広い使用事例に対応することができます。ASM Trafficは、現実に即した車両、センサ、トラフィックおよび環境シミュレーションをリアルタイムで提供します。アダプティブクルーズコントロール(ACC)、パーキングアシスト、交差点アシスタント、道路標識認識、歩行者認識、予測型ヘッドライト、予測型クルーズコントロールおよびエネルギー管理、ブラインドスポット検出、走行車線逸脱警告、緊急ブレーキアシストは、当社がプラントモデルを開発する際に念頭に置く使用事例の一部です。
ASM Trafficモデルの高度な柔軟性と使いやすさにより、あらゆる種類のトラフィックシナリオを定義して、徹底したADASコントローラのテストを確実に行うことができます。複雑な道路網の作成をサポートしているため、トラフィックを含む路上でのきめ細かな運転操作を定義できます。シミュレートする環境は、道路標識や歩行者などの静止および移動オブジェクトで構成できます。さまざまなセンサモデルおよびユーザ定義が可能なセンサを利用して、これらのオブジェクトを検知することができます。プリクラッシュ機能のテストでは、現実の世界で事故につながる恐れのあるトラフィックシナリオを定義したり、厳しい条件下でシステムの挙動を観察したりできます。トラフィックシナリオは、修正してすぐにシミュレートすることが可能であり、コードを再生成する必要はありません。
Automotive Simulation Modelsと運転支援システムのパッケージ
ASMを使用してトラフィックシナリオを作成する方法
トラフィックシナリオでは、主に自車の周辺にある車両とオブジェクトの移動位置および移動方法を定義します。ASM Trafficは、1台のテスト車両と多数の独立した周辺車両を含むトラフィックシナリオをサポートしており、これらのすべてで車線変更、速度変更、横断トラフィック、対向トラフィックといった必要な動作を実行できます。
トラフィックシナリオは、ModelDesk専用のGUIを使用して作成することができます。道路網や高度な道路特性の作成には、ModelDesk Road Generatorを使用します。仮想道路は幾何学セグメントから手作業で構築することも、OpenDrive、Open CRG、GPS、ADAS RP、Google Earth、OpenStreetMapなどの地図データから道路網全体をインポートして構築することもできます。道路の設計を3次元アニメーションソフトウェアMotionDeskと密接に連携させて、環境を定義することもできます。
道路網上の周辺車両の動きは、ModelDesk Traffic EditorのGUIで定義します。ASM Trafficでシミュレートするトラフィックシナリオは、MotionDeskのリアルタイム3Dアニメーションによりビジュアル表示できます。ModelDeskとMotionDeskは連動しています。ModelDeskのアップデート内容は、MotionDeskで即座に表示できます。
ModelDeskで各シーンを定義することにより、MotionDeskで3Dシーンを自動的に生成できます。たとえば、ユーザは郊外の道路、並木道、そして都市部の道路を定義し、道路のバンクや境界、樹木の間隔、道路反射板、街灯、建築物のタイプなどと共に、これらを完全にパラメータ化できます。細部の微調整は、MotionDeskおよび内蔵のScene Editorにより後で行うことができます。

MotionDesk
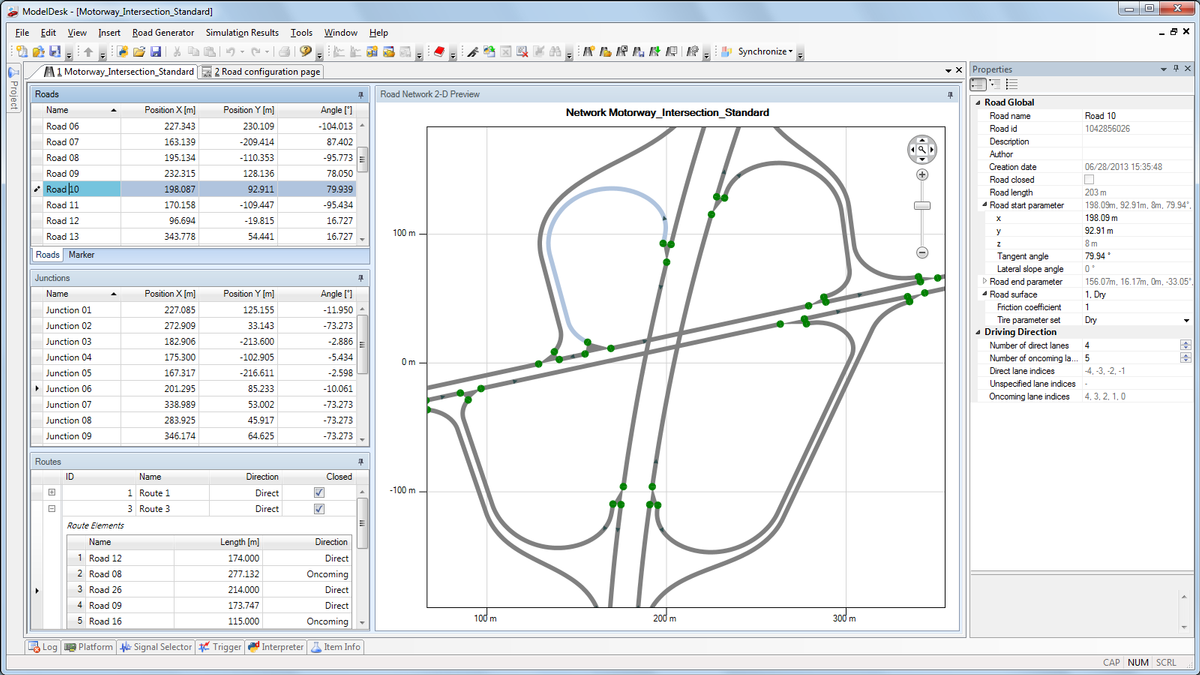
Road Generator
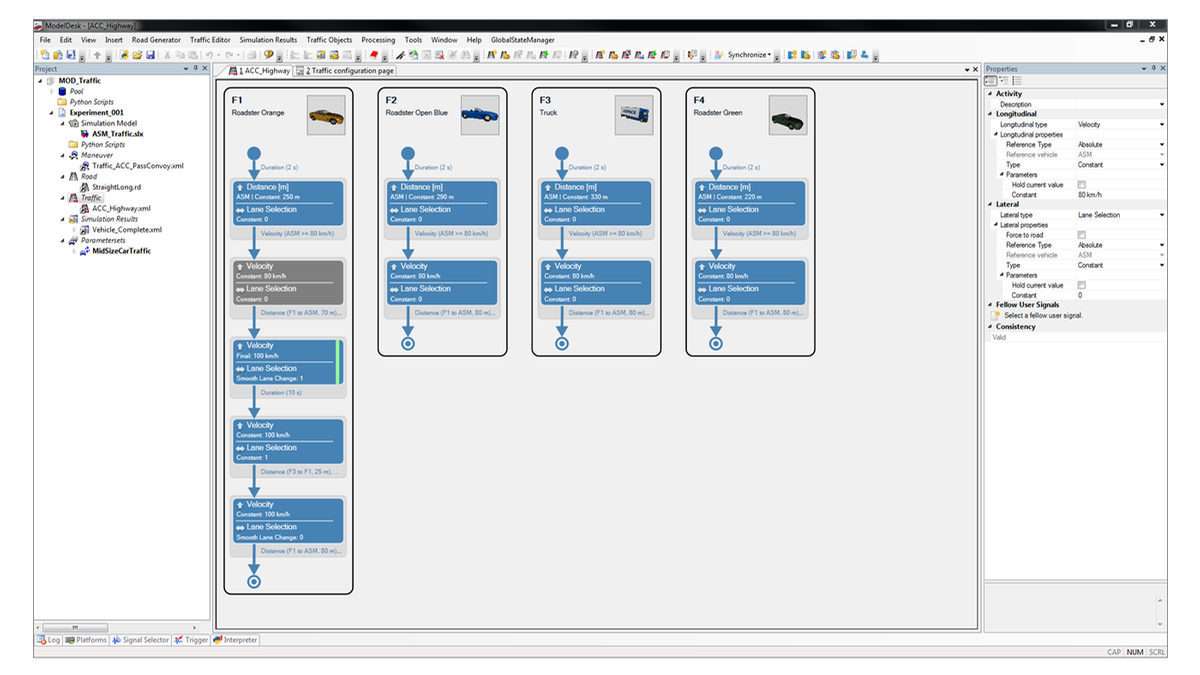
ModelDesk Traffic Editor

実際のセンサとアクチュエータを統合する方法
ADASテストでは、エンドツーエンドのテスト、すなわち、シグナルチェーンの最初のセンサから動作を実行する最後のアクチュエータまでのテストを行うことができます。たとえば、車線逸脱警告システムや走行車線維持支援システムなどのカメラベースの運転支援システムでは、数千キロメートルのテストドライブによる路上でのシステム全体の妥当性確認を行うことなく、ラボ内でHILシミュレータと仮想テストドライブを利用して関連するテストの大部分を実施することができます。
3Dビジュアル表示ツールであるMotionDeskは、自車の前方にある道路やトラフィックの合成カメラ画像を生成します。これらの画像は画面上に表示され、カメラセンサを統合した画像処理用ECUによって監視されます。ECUでこれらの画像を実際のトラフィック環境として解釈できるようにするには、カメラの焦点をスクリーンまでの実際の距離に合わせ、かつ生成した画像を実際の車両の前方カメラの視点に一致させる必要があります。このため、通常は3Dビジュアル表示ツールにより、関連する仮想カメラの位置や向きなどの設定を定義します。
また、グラフィックスカードによる実際の画像生成とカメラセンサのフレームクロックとを同期させ、PC上の3Dビジュアル表示ソフトウェアを使用して60 Hzなどの極めて一定したフレームレートで画像を生成することも必要です。このようにして、リアルタイムのクローズドループシミュレーションで画像処理用ECUをスティミュレートし、検出された車線区分線の形状や位置を車線逸脱警告および走行車線維持支援のアルゴリズムに転送します。
カメラとは異なり、レーダーセンサをトラフィックオブジェクト検出用のHIL構成で直接使用することはできません。その代わりに、実際のレーダーセンサの特性をシミュレートするのに適したセンサモデルが必要です。Automotive Simulation Modelsは、特にこの使用事例に合わせて調整可能な汎用センサモデルを提供しています。このセンサにより、3次元空間におけるそれぞれの道路利用者に最も近い点が計算され、関連する距離、相対速度、相対加速、および相対水平角が出力されます。このため、仮想テストドライブ中は、実際のレーダーセンサによって通常出力されるオブジェクトデータが計算されます。
システム全体の挙動の妥当性を確認するには、レーダーセンサモデルでエミュレートしたオブジェクトデータを、高速で低レイテンシの専用インターフェースを介して直接ECUに供給します。レーダーECUがHILテスト構成に直接組み込まれていない場合は、CANまたはFlexRayバス経由で他のECUにオブジェクトの検出情報をレストバスシミュレーションとして提供することができます。
レーダーベースおよびカメラベースのアクティブセーフティシステムのテストに対応したHIL構成。
ここで提示したdSPACEのツールチェーンを使用すると、PCのオフラインおよびリアルタイムのHILシミュレーションに継続して同じモデル、ツール、およびテストを使用することができます。これにより、MIL、SIL、およびHILシミュレーション時に、さまざまな運転支援システムの評価と妥当性確認を行うことが可能になります。特に、最新の量産車でますます一般的になっているレーダーベースおよびカメラベースのアプリケーションをテストする場合は、専用のモデルやツールを使用することができます。
最新の技術開発動向をつかんで、イノベーションを加速。
メールマガジンの購読希望・変更/配信停止手続き