各自動車メーカーでは、複雑化する最新車両で生じるさまざまな問題に対処するため、検証および妥当性確認分野向けの新しいアプローチを導入しようとしています。KPIT Technologies社は、複数のバッテリマネージメントシステム(BMS)を仮想的に統合してシミュレートすることが可能なテスト環境を開発しました。この方法では、SIL(Software-in-the-Loop)環境内でBMSをテストすることができます。
現代の車両はますます複雑化しています。電動化モビリティ、自動運転、コネクテッドカーなどの用語からも分かる通り、各メーカーが新車を開発する際にはソフトウェア開発がますます不可欠な要素になってきていますが、MIL(Model-in-the-Loop)、HIL(Hardware-in-the-Loop)、SIL(Software-in-the-Loop)のような従来の開発テスト手法では、いずれ限界に達します。なぜなら、ソフトウェアに統合箇所が複数ある場合、スケジュールが厳しくなるからです。
この問題に対処するため、各メーカーはソフトウェアの検証および妥当性確認に対してより包括的なアプローチを試みています。この記事では、自動車分野における新しく複雑な技術に、仮想的な検証手法で対応する方法について説明します。中でも特に、KPIT社が48Vバッテリマネージメントアプリケーションを検証するためにdSPACEツールチェーンを用いて開発した仮想テストベンチについて詳しく取り上げます。
当社の仮想テストベンチ(VTB)は、dSPACEが提供するソリューションをベースとしてコンポーネントレベルで仮想的にHILテストベンチを再現しており、車両監視システム、インバータ、バッテリマネージメントシステムなどのテストを実行します。


アジャイル開発に向けた統合ソフトウェアのテスト
こうした難問を経て、注目されるようになってきたのがバーチャルECUを備えた完全に仮想化されたテストベンチです。仮想テストベンチは10年以上前から開発されており、多くの大手メーカーが統合ソフトウェア開発やソフトウェアのテストの際に既に使用しています。そこでは実ECUの代わりにバーチャルECU(V-ECU)が使用されています。インドの企業であるKPIT Technologies社は、この分野をリードするサプライヤでありますが、同社ではお客様の仮想テストベンチのセットアップをコンポーネントレベル、サブシステムレベル、およびシステムレベルでサポートし、お客様がテスト戦略を容易に変更できるようにしています。
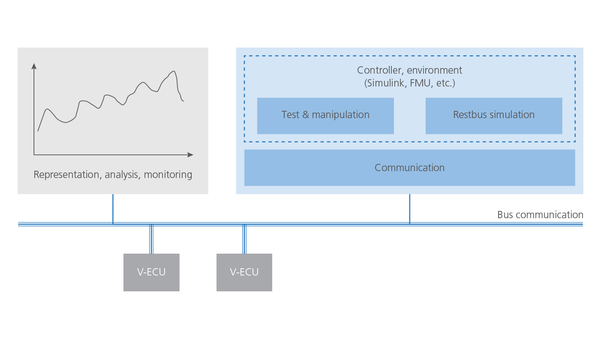
KPIT社の仮想テストベンチ部門の技術リードエンジニアであるPriyanshi Gupta氏は、「当社の仮想テストベンチ(VTB)は、dSPACEが提供するソリューションをベースにしてHILテストベンチをコンポーネントレベルで仮想的に再現しており、車両監視システム、インバータ、バッテリマネージメントシステムなどのテストを実行することができます」と述べています。これらの仮想テストベンチセットは、dSPACEのシミュレーションソフトウェアであるVEOS、アーキテクチャソフトウェアであるSystemDesk、プラントモデルであるdSPACE Automotive Simulation Models(ASM)、およびレストバスシミュレーションコンテナを統合して構築されたものです。さらに、VTBには標準的な各種のテストツールを接続できるようになっているため、VTBおよびHIL間で一貫性のあるテストを実行することが可能です。
Gupta氏は、「このアプローチは車両全体に拡張でき、さらには関係するすべてのエンジニアが利用できるため、より速やかな開発、統合および妥当性確認を可能にします」とし、「また、テスト環境をセットアップしてクリック1つでアップデートしたり、必要な場合は素早く拡張することもできます。さらに、各メーカー固有のツールや継続的インテグレーション/継続的デプロイメントパイプラインを容易に統合することも可能で、これは強みを最大化するものです」と述べています。

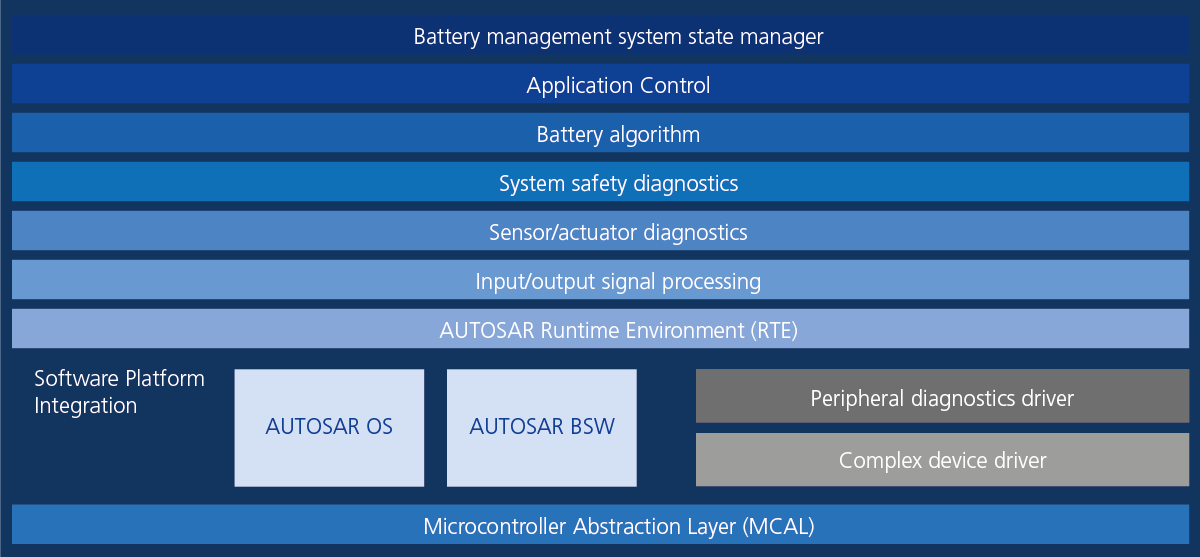
充電状態(SOC)は利用可能な電池容量として計測されますが、セルの化学的特性や劣化要因などに応じて変化します。BMSでのSOCの評価には、さまざまなアプリケーションコンポーネントやベーシックソフトウェア(BSW)のソフトウェアコード、コンプレックスデバイスドライバ(CDD)、および特定用途向け集積回路(ASIC)が関係しています。これらの機能や各ソフトウェアレイヤー間の相互作用がより複雑化していることを考慮した場合、ソフトウェア全体の複雑性やソフトウェアエラーの影響は、MILテストで一般的に計測される単純に局所的な影響よりもはるかに重大なものとなります。
仮想BMS ECUテスト環境(VTE)では、ユニットレベルだけでなく、ソフトウェア全体に関する影響や設計変更の分析・妥当性確認をするための適切なツールを提供することで、BMSソフトウェアの安全性や堅牢性、品質の要件に対応しています。
図2は、センサフィルタリングコンポーネントにおける1つの設計ミスがどのようにソフトウェア全体に影響を及ぼし、アルゴリズムや制御、継続的な診断に影響するかを明示したものです。この問題は、KPIT社がBMSソフトウェアプラットフォームを検証した際にVTEで検出されました。KPIT社のBMS制御およびソフトウェアソリューション部門のアーキテクトであるDebango Chakrobarty氏は、「結果的に当社は、dSPACEのツールチェーンと環境を使用することで、当社のBMSソフトウェアプラットフォームの90%の妥当性確認に成功しました」と述べています。
診断サービスプロトコルのスケーリングと妥当性確認
診断サービスは通常、複数のグループによって、機能性またはプロトコルが集中するフェーズにおいて実施されますが、KPIT社では柔軟性に優れたdSPACE環境を使用することで、UDS(Unified Diagnostic Services)やそれに関連する機能などの診断サービスプロトコルを容易に拡張し、検証することができました。また、同社は診断オーサリングおよびソフトウェア開発の問題を特定し解決するため、OTX(Open Test sequence exchange)や同社のBMSソフトウェア向けにカスタマイズした機能などの標準テストスイートも検証しました。
さらにプラントモデルの実行時にVHILコンポーネントを使用して入力変更を行いエラーを生成すると、ソフトウェアが正しい診断エラーコードをトリガすることが実証されました。それとともに、サードパーティ製ツールを統合し、OTXを実行することで規格に適合していることについても確認を行います。このようにしてBMSの応答を検証していきました。
また別のテストでは、すべての物理パラメータが正常範囲内に収まるとコンタクタが正常に閉じ、BMSがCANからの高電圧要求を介して高電圧の電源ONステータスを適切に報告することも示されました。そしてクリティカルな過電圧しきい値を超えるまでセル電圧を高めると、バッテリプラントモデルがセルの過電圧欠陥を挿入しました。それに応じてBMSはその欠陥の影響を受けるコンタクタを開き、CAN経由でステータスの監視が行われました。これに伴い、クローズドループで欠陥が挿入されることも検証されました。
KPIT社では最後のテストケースとして、バッテリプラントモデルにおいて温度不足欠陥をセル温度センサに挿入しました。仮想CANバス上でBMSから送信される電力制限値を監視し、BMS電源リミットが下降線を示してシステムがリンプホームモードに入ったことを確認しました。ここでは熱システム出力に応答して、BMS熱調整コマンドが表示されています。
同社では上記のテストだけでなく、すべての通信フレーム、統合機能の妥当性確認、および車両レベルの仮想テストベンチへの拡張に関する回帰テストを仮想テスト環境で行い、
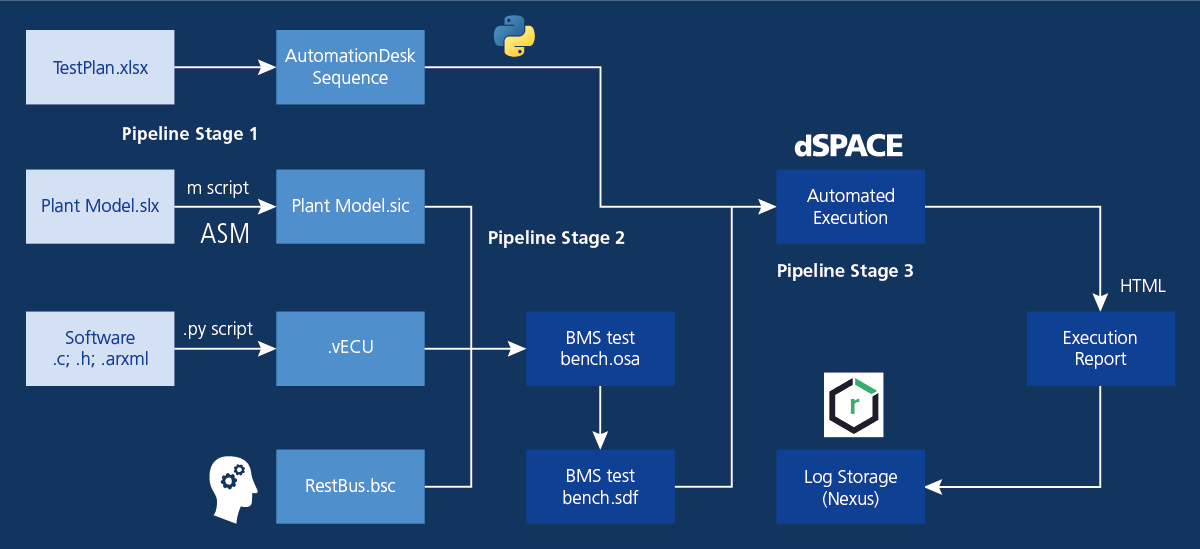
さらには実行した仮想テストベンチの継続的インテグレーション/継続的テスト(CI/CT)ワークフローへの統合を遂行しました。開発サイクル全体では100以上のデータパイプラインが定義されたため、コンポーネントレベルからシステムレベルにいたるまで、すべてのお客様のテストへの対応が保証されたということです。図3が示しているのは、テスト実行プロセスの簡略図です。BMSテストベンチは、Jenkins CIを使用してセットアップされています。これらのパイプラインは、各種のテクノロジとともにKPIT社のさまざまなお客様のシステムに実装されています。
当社はdSPACEと協力し、自動車メーカーのすべての車両プログラムに関するコンポーネントレベル、サブシステムレベル、および車両レベルでのテストに使用できる、このようなテスト環境を開発しました。利点は明白です。コンポーネントレベルでの仮想HILセットアップおよび環境を使用すれば、ECUソフトウェアのより迅速な妥当性確認が可能になり、Vサイクル全体を通してテストカバレッジを90%も向上させることができます。

仮想テスト環境の利点
今日の製品開発領域においては、プラットフォームベースのアプローチが広く普及してきています。それに伴い、コンポーネントプラットフォームのスケーリング、調整、より多くのバリアントへの変換のための理想的な環境を提供するKPIT VTEのような仮想テストベンチが登場し、テストの効率性を大幅に向上させています。
KPIT社の仮想テスト環境部門のアーキテクトであるNeeraj Patidar氏は、「当社はdSPACEと協力し、自動車メーカーのすべての車両プログラムに関するコンポーネントレベル、サブシステムレベル、および車両レベルでのテストに使用できるこのようなテスト環境を開発しました」とし、「利点は明白です。コンポーネントレベルでの仮想HILセットアップおよび環境を使用すれば、ECUソフトウェアのより迅速な妥当性確認が可能になり、Vサイクル全体を通してテストカバレッジを90%も向上させることができます」と述べています。KPIT社は、自動車メーカー固有の要件をすばやく実装できるVTEコンポーネントをお客様に提供していきます。VTEは、高精度かつ安定した協調シミュレーションオーケストレーションを何千もの同時利用者に提供し、利用者たちが複数のテストジョブを同時に一斉送信できるようにします。
KPIT Technologies社のご厚意により寄稿
KPIT社について
KPIT Technologies社は、ソフトウェアデファインドビークルを実現するための自動車およびモビリティエコシステムを提供するグローバルパートナー企業です。独立系大手ソフトウェア開発および統合パートナーであり、クリーンかつスマート、そして安全な未来に向けたモビリティ分野の跳躍を支援しています。世界中に9000名以上ものAutomobeliever(組み込みソフトウェア、AIおよびデジタルソリューションに特化した従業員)を抱えるKPIT社では、クライアント企業の目指す未来のモビリティロードマップの実現に向けて、次世代技術の導入を加速させています。欧州、米国、日本、中国、タイ、インドに技術センターを置き、自動車およびモビリティ業界の大手企業と協力しながら、変容するエコシステムの最前線で活躍しています。