当社には将来の明確なビジョンがあります。我々は、ドライバーがいなくても車両を目的地に自動的に到着させたいのです。しかし、自動運転の実現に向けての最初のステップさえもチャレンジでした。なぜなら、車両の自動化は部分的に進んではいるものの、特定の状況にしか対応できないからです。
ハイウェイパイロットといった(部分的に)自動化されたシステム向けの精巧な機能は、単純に開発するのが難しいというだけではありません。そうしたシステムはいかなる状況においても、想定された機能以上の安全な動作を常に保証しなければなりません。実際の交通では車両はテストで検証すべき無数の状況に対応する必要があります。ただし、全てのテストを路上で実施できるわけではありません。しかし現状、ECUと直接リアルタイムに連携するシミュレーションソリューションすら、膨大な量のデータによって負荷が大きく捌ききれていない状態です。
テストオブジェクトとテストの分散
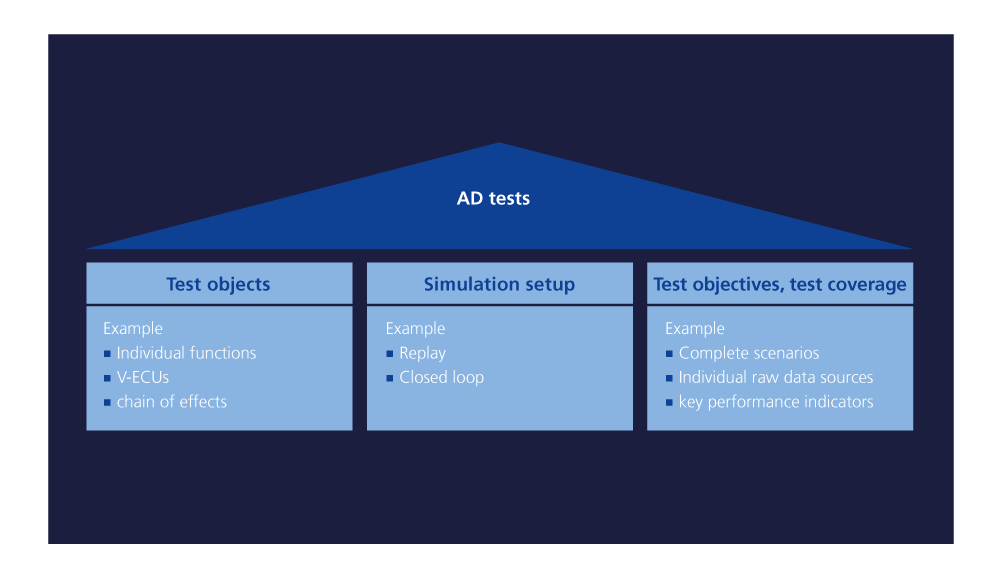
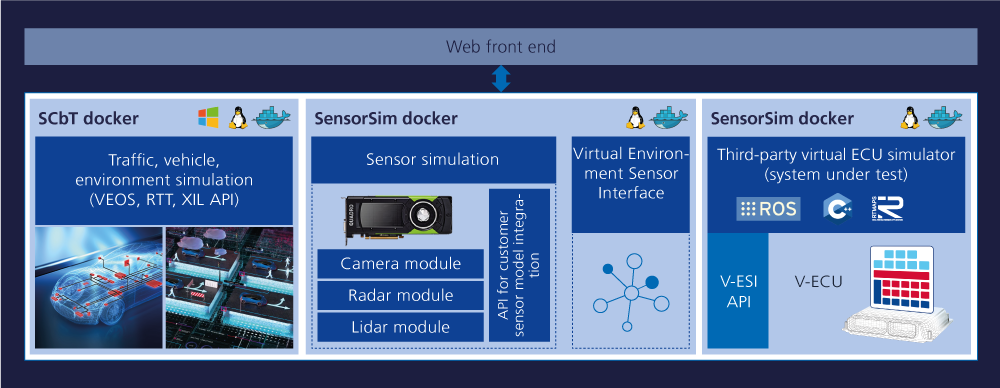
1つ目の柱であるテストオブジェクト向けのソリューションでは、テスト対象サブジェクト(SUT)、つまりテストする機能の実際のコードに重点を置いています。ここでは、テスト対象の制御ユニットと制御ユニットネットワークを直接用いて、または路上で、主要かつ決定的なテストを実行しなければなりません。必要な数のテストを実行するためには、テストのかなりの部分をSIL(Software-in-the-Loop)システム上で実行する必要があり、仮想化されたテストオブジェクトを必要とします。仮想テストオブジェクトを提供するための技術的な方法はいくつかあります。たとえば、適切なインターフェースを使用して、完全かつ実行可能なユニットとしてコードをシミュレーションシステムに統合する手法です。dSPACEは現在、コンテナ技術を用いて、このような統合の実用化に取り組んでいます。また、量産コードをバーチャルECU(V-ECU)として統合することもできます。dSPACE SystemDeskは、バスの接続からオペレーティングシステムの設定に至るまで、量産コードの統合におけるあらゆる利点を提供します。テストオブジェクトをどのように仮想化するかを決定するうえでは、テスト範囲が正確に定義されなければなりません。個別の機能を検証したいでしょうか?それともECUソフトウェア全体、もしくは特定箇所でしょうか?それらの要素が最終的にSUTの設計を決定することになります。

シミュレーション構成
2つ目の柱であるシミュレーション構成は、シミュレーションシステムとインフラストラクチャの両方に関係します。SILテクノロジを使用すると、シミュレーションを専用のリアルタイムハードウェアから切り離して動作させることができます。VEOSによって、dSPACEはSILテストの基盤として使用できるPCベースのシミュレーションおよび統合プラットフォームを提供します。この汎用性が特に重要なのは、2つの理由からです。1つめは環境があらゆる詳細なレベルにおいてシミュレートできる点です。モーターモデルやバッテリモデルだけでなく、これには特にあらゆる関連レベルの詳細ーオブジェクトリストから実際のセンサデータに至るまでーをシミュレートできるセンサモデルをも含みます。そして2つめは、そのゴールが高スループットのテストが実現できるよう、テスト構成を容易に拡充できるようになっている点です。公共のデータセンターや顧客向けのデータセンターといった多くのクラウドシステムでは、並行インスタンス化を複数回実行できるプラットフォームを提供するためにコンテナテクノロジや協調テクノロジを活用しています。dSPACEでは、VEOSインストレーションなどを含む事前設定済みのコンテナを提供することで、クラウドシステムとのシームレスなツールの統合に取り組んでいます。
テスト目標
3つ目の柱であるテスト目標によりテスト需要が激増しているといっても過言ではありません。最終的に妥当性確認は、シミュレーション中に特定のトラフィックシナリオの範囲を完了することで行われます。これには、合成シナリオのシミュレーションとそのバリエーションも含まれます。またテストドライブ中に記録された計測データの再生も、この妥当性確認の主要パートになるでしょう。まずは実際のテストソースか、またはPegasus手法に基づいて、車両が正常に完了しなければならないシナリオを特定する必要があります。これらのシナリオとは、基本的に論理シナリオと呼ばれる比較的少数のテンプレートのバリエーションです。たとえば市内交通において車両が取る特定の回避動作は、異なる条件下の幅広いバリエーションでもって検証されなければなりません。一例では基本状況は同じまま別の車両が不意に車線変更してくるなどの際です。
いったんシナリオの基本セットが使えるようになれば、それが数多の特定のテストケースを生成するためのソースになります。つまり論理シナリオの設定からスタートすれば、アルゴリズムがその後シミュレーション中に実行される最終的な特定シナリオを生成してくれるということです。シンプルなアルゴリズムとしてはパラメータを総当りで設定する方法や確率的に設定する方法があります。より高度なアルゴリズムでは、最適化手法や人工知能を用いて重要なシナリオを特定しようとします。
もう1つ、テスト構成において過小評価されがちですが重要な要素があります。一元的な設定を可能なままに、プロセス全体は自動化されなければならないということです。将来的な妥当性確認は高度なテストプロセスの定義を主眼とするのではなく、基本的要素、すなわちテストケースプロパティに狙いを定めることになるでしょう。なぜなら、これらのプロパティは、シミュレーションで記録された計測値から算出できるためです。
VEOSには、たとえば、前後を走行する2台の車両の相対速度は、それぞれの速度から直接導き出すことができます。これらのプロパティの計算は、シミュレーション中またはシミュレーション後に行われますが、実際のテストプロセスには影響しません。そのため、クローズドループオペレーションで常に決まったテストプロセスを使用できるようになり、テスト手順を手作業で定義する必要もなくなります。
まとめ
自動運転機能の開発は、OEMメーカー、昔ながらのサプライヤ、およびプラットフォームプロバイダの間の基本的連携モデルに変化をもたらしています。もはや完成したECUを提供することは主眼ではなく、重要なのは分散している車両機能を統合し、早い段階でできれば企業間をまたいで妥当性確認をすることです。基本原理として、エラーの発見は早ければ早いほど、その修正コストは安価になります。つまり共有されたシミュレーションやテスト用インフラストラクチャへアクセスできるようになれば、連携の新しい形態が可能になるのです。そうはいっても結局、これは新たな連携体制における数ある課題の1つを示したに過ぎません。膨大な数のシナリオの妥当性を確認することは、自動運転機能の主要な課題の1つです。これらの課題に対応するため、dSPACEのシナリオベーステストは3つの柱を主軸にしています。このソリューションは前述した側面の多くを考慮している一方、極めて複雑になることもあります。しかしdSPACEは妥当性確認のワンストッププロバイダとして、こうした分野のそれぞれにソリューションを提供しています。
当社のツールチェーンを使用すると、高水準のテストカバレッジとシナリオの多様性を保証しながら、さまざまな機能の妥当性確認やECUネットワークのシミュレーションをワンクリックで実行できるようになります。また、コードの品質に関する迅速なフィードバックをいつでも開発者に提供できます。そしてこのことが、必要とされるテストドライバーの人数やテストドライブの回数を扱いやすいところまで削減してくれるのです。
dSPACE MAGAZINE、2020年1月発行