自動運転の際の人工知能による認識状況分析から行動計画までの処理チェーンにおいて、特に難題となる事柄をどうしたら解決していけるでしょうか。テクノロジ企業であるBosch社は、understand.ai社のアノテーションされたセンサデータを使用することにより、ニューラルネットワークを効率的にトレーニングする方法を開発しました。
高度な自動運転や自律走行などの新しい革新的モビリティコンセプトでは、技術システムの安全性や信頼性に厳しい要件が課されます。SAE Level 5に及ぶような、極めて信頼性の高い自律走行制御システムの効率的な開発には、適切なテクノロジの利用が欠かせません。そのため、従来の制御ベースの手法だけではなく、ニューラルネットワークのトレーニングから得られる機能を活用する手法も重要です。高速な画像演算処理装置(GPU)を実行した場合、ニューラルネットワークは高分解能センサで収集された膨大な量のデータを処理するのに非常にぴったりなのです。
AIの適用分野の特定
ニューラルネットワークでは、認識状況分析から行動計画までの処理チェーンの中で、人工知能(AI)を適用できそうな潜在的分野を特定することが最初のステップとなります。加えて、機械学習の領域でも有望そうな手法を評価する必要があります。Bosch社では、マルチモーダル認識ーすなわち動画、レーダー、およびLiDARセンサの統合データを利用した車両の環境認識ーに焦点をあて、AIの適用可能分野と学習方法の両方を調査するプロジェクトを立ち上げました。
極めて多様なデータセットの準備
同社のプロジェクトでは、実際の運転中に記録された車載センサの生データをトレーニング用データとして利用しました。記録に使われる交通環境は、極めて多様でなければなりません(高速道路、地方道、市街地、トラフィックオブジェクト、トラフィックシナリオなど)。この多様性を獲得するために同社は、理想的な経路の種類や特徴、および経路カテゴリを定義することにしました。実際のテストドライブでは、この定義に合致し、定義された全てのカテゴリをカバーする走路が選択されました。

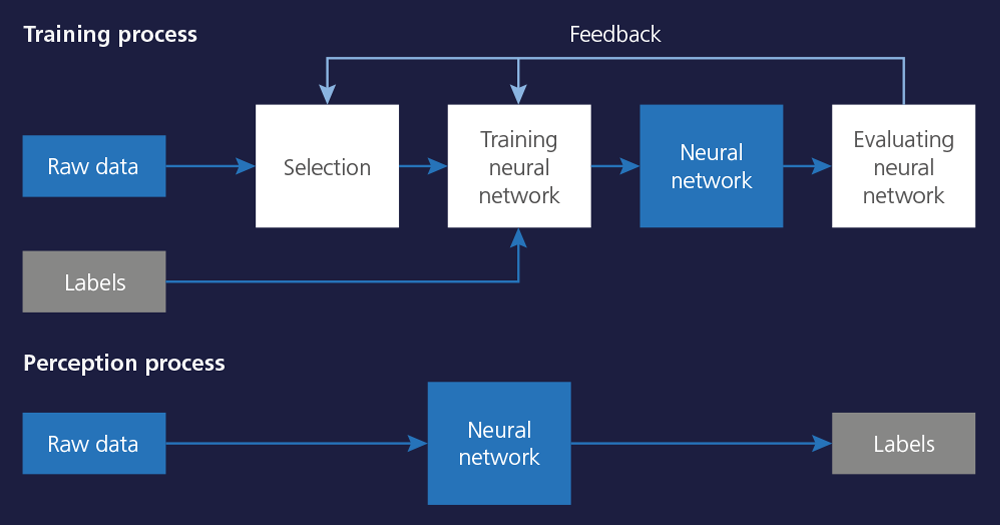
教師あり学習を利用したニューラルネットワークのトレーニング
ニューラルネットワークは、人間の脳と同様に、良い例と悪い例を比べることで学習を行います。つまり、正しい結果を得られる道筋は維持され、誤った結果に至る道筋は破棄されます。また、結果が正しいことを見極めるには、タスクと正解の両方が必要です。自動運転システムでは一般的に、センサの生データをタスクと認識し、検出されたオブジェクトを正解と認識します。このアプローチは教師あり学習(Supervised Learning)と呼ばれており、目標データ(生データとラベル/アノテーション)という形の目印(ラベル/アノテーション)を付けることにより、正解を直近のステップで取得できるようになっています。
ニューラルネットワークの学習教材
(機械)学習を成功させるには、質の高い学習教材を使用しなければなりません。それゆえに、AIが後工程で自ら認識することになる関連オブジェクト(ピクセルパターンなど)は、データの中で正確に目印を付けられ、分類されていなければなりません。この工程は、一部手作業となり極めて高度な労力を伴うため、Bosch社は ラベリングの自動化 に特化したサービスプロバイダであるunderstand.ai社(dSPACEグループ企業)に、 匿名化したデータ を送付することにしました。Bosch社とunderstand.ai社は、トレーニングを成功させるため高精度の品質目標を設定しました。
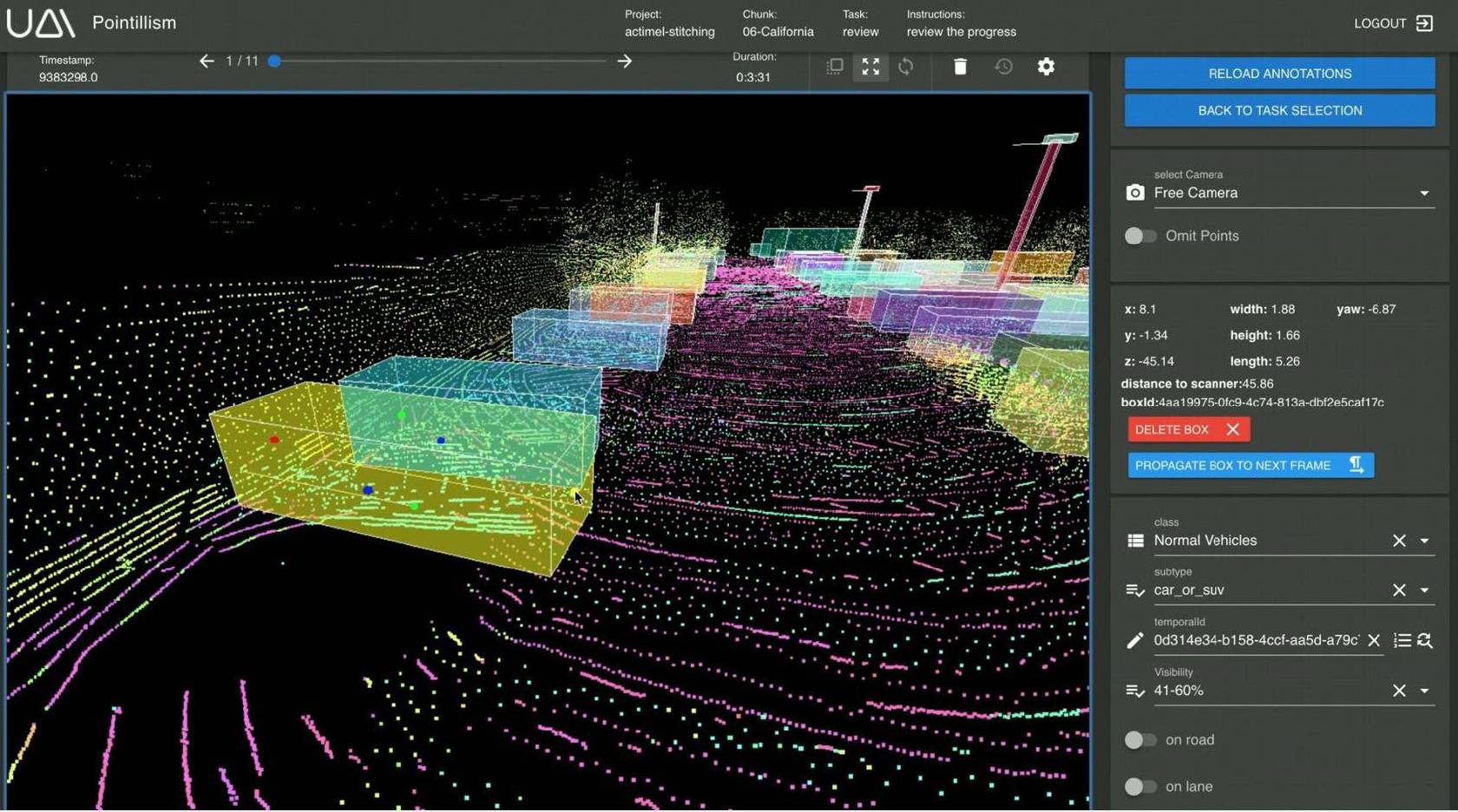
LiDARデータの3Dアノテーション
この共同作業では、LiDARセンサのデータにアノテーションを付ける作業を行いました。ここでは 、LiDARの3D点群で配置された高精度の バウンディングボックスを使用して、各種のオブジェクトに目印を付けました。妥当性確認には、カメラセンサのデータを使用しました。このような場合、反復的な手法を用いると好結果が得られ、決められた品質目標を達成できることが証明されています。この手法を採用した中で、understand.aiとの間のフィードバックループにおいて途中結果が確認され話し合われました。こうしたフィードバックループと継続的な要件改良が、求められる品質レベルを早期かつ継続的に保証することに役立ちました。

アノテーション時の特別な課題
アノテーションの特別な課題として、乗用車とバンの区別や、ルーフボックスや自転車ラックを搭載した車両の検出などが挙げられます。このような複雑なタスクを解決するには、専門知識と強力なツールが必要です。understand.ai社は、ウェブベースまたはAIベースのオブジェクト検出ツールと予測ツールを使用してバウンディングボックスを判別するという高度なソリューションを示しました。
アノテーション付きセンサデータによる教師あり学習
アノテーション付きデータは、AIを適用できそうな潜在的分野を特定するために使用されています。そして、さまざまなネットワークを特定のアプリケーション向けにトレーニングし、その挙動やパフォーマンスを評価しました。このトレーニングには、ネットワーク深度やデータ量に応じて、数日または数週かかる場合がありましたが、Bosch社では、強力なGPUベースのコンピュータクラスタを備えた協調型ITインフラストラクチャを使用することで、トレーニングプロセスを成功に導くことができました。

結果と精度
AIが後工程で明確にオブジェクトを特定できるかを左右するのは目標データの質であるため、高精度なアノテーションは教師あり学習にとって不可欠な前提条件になります。understand.ai社のアノテーションは、求められる品質を提供することができました。ただ、アノテーションはこの程度の複雑さには十分対応できる一方、完璧とは言えません。他の開発分野と同様、アノテーションは継続的な学習プロセスに依存しています。つまり、可能な限り最高の品質を実現するためには、プロセスやツールを継続的に調整し最適化する必要があります。そして、強力なツールや効率的なフィードバックサイクルに基づき確立されたプロセスによって初めて好結果が生まれます。つまり、アノテーションを経済的かつ効率的に運用するには、アノテーション専門チームの広い経験と高い専門知識が非常に重要となります。
今後の展望:サラウンドビューデータのアノテーション
Bosch社では、カメラ、LiDAR、およびレーダーセンサを通じて車両環境を高分解能で記録できる360°環境検出の実現に向けて、新しいプロジェクトを計画しています。ただし、これにより、データ量や同期処理、統合したデータへのアノテーションといった新しい課題も生じます。現在、Bosch社とunderstand.ai社の専門チームは、このプロジェクトの進め方について検討を行っています。


