自動運転の実現には、単に「多数のADAS」を車両に取り付ける以上のことが求められます。そのため、ISO 26262よりも広範囲な自動運転車両のテスト規格であるSOTIFが策定されました。Pan Asia Technical Automotive Center(PATAC)社では、このSOTIF規格に従ってテストを実施しています。
システムの不具合が主なリスクとなる従来型の車両とは異なり、自動運転車両ではシステム機能の設計に制限を受ける可能性が高く、特定の状況で本来想定されていたものとは異なる動作をする可能性があります。そのため、自動運転車両のテストでは、従来型の車両で使用する手法とは別のアプローチが必要となります。このことが、後にSOTIFテスト規格(別名ISO PAS 21448)の開発につながりました。SOTIFはISO 26262規格を補完するものであり、特に自動運転車両向けに設計されています。SOTIFでは、自動運転機能のテストを行う際に必ず適用すべき手法を定義しています。このアプローチは、実際の路上テストだけでなく、シミュレータで行われるテストをも含みます。

リスクの分類
効果的なテストを定義する際には、事前に想定されるシナリオを把握することが極めて有効です。シナリオには4つのタイプがあります(図1)。既知の安全な状態、既知のリスク、未知の安全な状態、および未知のリスクです。機能テストの主な焦点は、この既知と未知のリスクになります。これら2つのタスクのうち、既知のリスクには要件ベースのテストを利用できるため、評価はより容易です。この場合、組み立てラインのプロセスと同様にテストをカスタマイズしながら設計し、段階的に処理していきます。

未知のリスクに対するテスト
一方で、未知のリスクを調査することは非常に困難な作業です。どのようにすれば、未知で、つまりテストケースが明確に定義できないリスクを評価できるのでしょうか。この問題を解決するには、できる限り多数の走行バリエーションを用いた運転シナリオを使用する必要があります。これは、自動テストにより再現可能なシミュレーションができるテスト環境で実施されます。このアプローチでは、車両、センサ(レーダー、LiDAR、GPS、HDマップなど)、環境的要素(雨、道路条件、標識、交通量、各種道路利用者など)、歩行者、自転車などについて、それぞれの挙動を含め、高精度の仮想化モデルを作成する必要があります。このようなテストシナリオのモデリングは、未知のリスクを含め、無数のテストケースにおけるモデルパラメータ値のバリエーションをすべて適切な時間内でサポートできるようになります。これは、従来の手作業によるテストでは不可能です。

例:車線維持システムのテスト
PATAC社では、SOTIFガイドラインに従って車線維持システム(LKA)向けの特定のテストを行いました。LKAでは、カメラを用いて左右の車線を監視し、車両が逸脱しそうになると自動的に介入して軌道を修正します。車線維持を実現するには、LKAによって電動パワーステアリング(EPS)に指示したステアリングトルクを素早く実現する必要がありますが、同時にドライバーに悪影響を与えないよう自然に行わなければならなりません。同社では、このようなシナリオ向けに、実車によるテスト走行を実施しました。
ドライバーが一般的なカーブに沿って走行すると、LKAはCANバス経由でEPSに補正操舵トルクを加え始めます。一連のテスト走行では、LKAによる補正操舵トルクを徐々に増加させるため、ドライバーもそれに合わせて操舵トルクを大きく加える必要があります。このプロセスは、ドライバーが車両を車線内に維持できなくなるまで継続されます。そしてLKAから指示される操舵トルクの上限値は、この時点のパラメータ値のわずか下の値に設定されます。
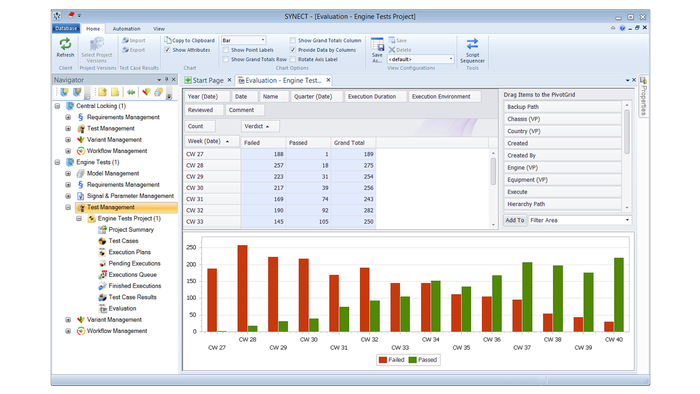
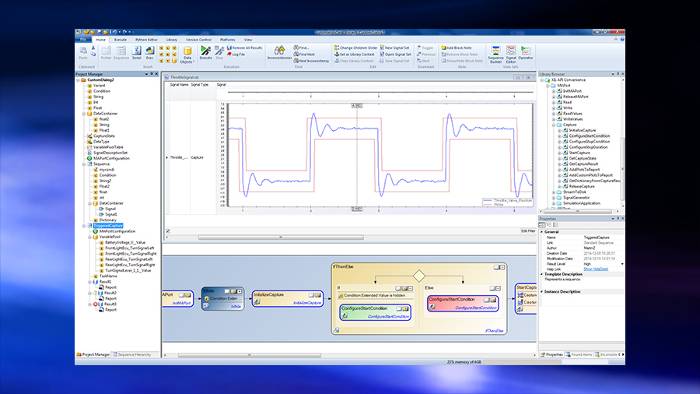
dSPACEツールにより、テスト作業を最小化
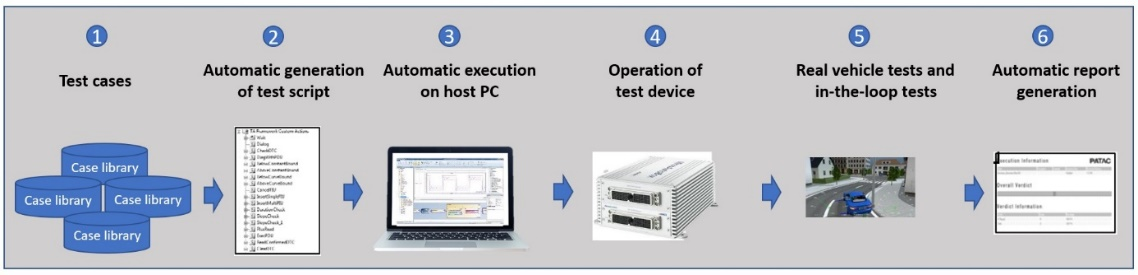
同社では、開発環境に複数のdSPACEハードウェアやソフトウェアツールを使用しています(図3)。一般的な作業プロセスにおいて、最初のタスク(ステップ1および2)で重要な点は、以降の自動テスト用のテストスクリプトを作成することです。従来の作業プロセスでは、これらのテストスクリプトを手作業で作成し、テストケースごとに書き直す必要がありましたが、これにはかなり多くの時間と手間が掛かっていました。しかし、図示された作業環境では、このプロセスを極めて効率的に行うことができます。ここでは、dSPACE SYNECTおよびAutomationDeskを使用することにより、過去の同様のテストケースで使用された既存のスクリプトから新しいテストスクリプトを自動的に作成することができます。
テストケースのパラメータを設定する際は、Excel®のマクロファイルを活用することで、さらに作業を単純化できます。同社では、この手法により、幅広いテストパラメータを使用して極めて短時間のうちに無数のテストケースを自動的にシミュレートできるようになりました(ステップ3)。このようなアプローチは、SOTIFに準拠したテストを行いながら、最高レベルの確率で未知のリスクをカバーするためには絶対に必要です。また、同社では、自動運転車両の実際の機能テストにHILテストプラットフォームを使用したり、実車によるテスト走行を活用し(ステップ4および5)、dSPACE MicroAutoBoxがコントローラの役割を果たしました。さらに、HILテスト向けだけでなく、実車によるテスト走行向けのテストプロトコルを自動的に作成することができます(ステップ6)。

まとめ
SOTIFは、自動運転車両の開発専用に設計された初の規格です。SOTIF規格に基づいてテストを行うと、自動運転車両の機能を設計する段階で生じたエラーを検出することも可能です。PATAC社のテスト環境はdSPACEツールチェーンを用いて整備され、SOTIFに準拠した自動テストに対応しています。HILテストだけでなく実車によるテスト走行も実施できること、また多面的なテストケースを迅速かつ自動的に作成できることがこのテスト環境の重要な利点です。
著者について:

Shang Shiliang
PATAC (Shanghai, China)

Cui Haifeng
PATAC (Shanghai, China)
Yang Chunwei
PATAC (Shanghai, China)

Guo Mengge
PATAC (Shanghai, China)
PATACについて
1997年に設立されたPATAC(Pan Asia Technical Automotive Center)社は、General Motors China LLCおよびShanghai Automotive Industry(Group)Corporation(SAIC Motor)の合弁会社です。同社は、GMの上海向け製品の開発に重点を置く浦東の設計開発センター(中国、上海)を有しています。同センターは、General Motors社が持つ世界で2番目に大きい技術開発設計センターとしても機能しています。PATAC社は、自動車開発の分野で世界的に名高い革新的な企業として実績を挙げるという目標を掲げながら、設計、技術開発、テスト、および妥当性確認に関するあらゆる種類の自動車開発サービスを提供しています。