新しい機械を組み立てる際、事前に仮想化して最適化すると言ったらSFのように聞こえますか。そうですよね。しかし、デジタルツインと呼ばれる概念では、これが作業の中核となります。KEB Automation社では、このような作業をdSPACE SCALEXIOリアルタイムシステムを用いて実行することにより、新しい機械の開発期間を大幅に短縮しています。
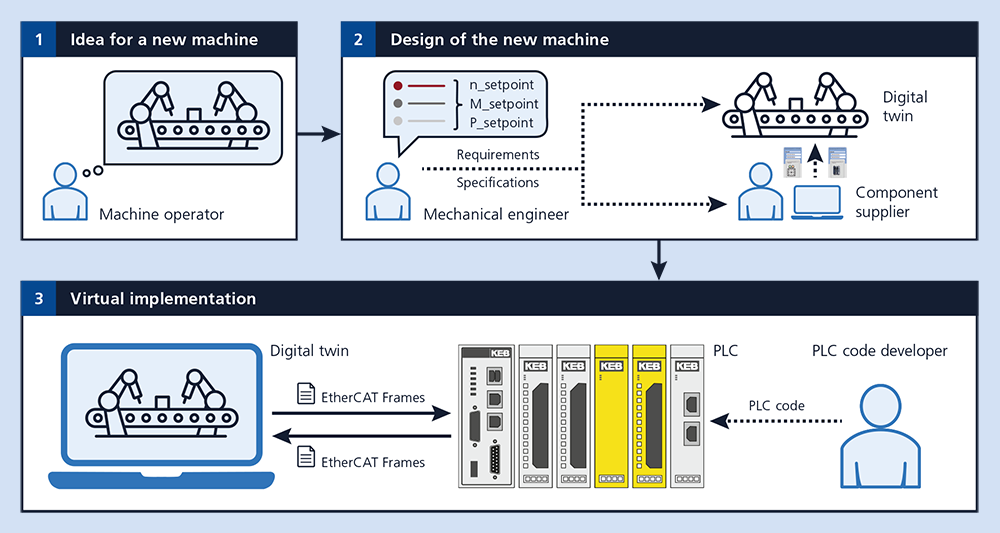
工業用機械の開発ではシミュレーションが重要であるため、開発の際に機械の仮想的なコピーであるデジタルツインを用いて仮想コミッショニング(VD/VDEガイドライン3693に記載)を行う手法が確立されてきています。この手法は、エミュレートされたフィールドバスやリアルタイムEthernetインターフェース、実際のプログラマブルロジックコントローラ(PLC)を含む工業用機械を実際に組み立てる前に、仮想的な実装環境でリアルタイム対応のHILシミュレーションによって各種のセンサやアクチュエータと組み合わせて仮想的に動作させるものです(図1)。これにより、実機の試運転(コミッショニング)を行う前に、PLC制御コードのプログラミングエラーを検出し修正できるようになります。ただし、仮想コミッショニングの結果は、プラントモデルがいかに精密かによって大きく異なります。
従来の手法:ビヘイビアモデル
ビヘイビアモデルは現在でも、一部を再設計したドライブコントローラや実際のコンポーネントからファームウェアコードを取り出してきたドライブコントローラにおいて頻繁に使用されています。しかし、通常はこれらのビヘイビアモデルで考慮されているのは実際のドライブコントローラの一部分のみであるため、実機を始動させて初めてエラーが顕在化する場合もあります。つまり、機械開発における反復作業を減らすには、高品質なビヘイビアモデルが必要だということになります。
今後の手法:ファームウェアシミュレーションモデル
シミュレーションモデルにおいて、ビヘイビアモデルではなく、ドライブコントローラの総合的なファームウェアコードを使用する利点は、大きく2つあります。第一に、ファームウェアシミュレーションモデルでは、診断、設定エラーの検出、パラメータのテストなどの面ではるかに詳細かつ現実的であります。そしてファームウェアのアップデートごとに機能範囲を自動的に拡大させたりすることができます。
エンジンシミュレーションモデルに必要な強力なツール
仮想コミッショニングで一般的に使用されるシミュレーションツールは、実際のPLC接続をエミュレートさせたフィールドバスやリアルタイムEthernet接続によって行う場合など、主に機械的または材質的なフロー要素をシミュレートする目的で設計されています。これらのツールは、機械的または材質的なフロー要素のシミュレーションには十分ですが、エンジンシミュレーションモデルには不十分です。そのため、ドライブコントローラは抽象化されるだけであり、モーターのシミュレーションは最適な方法がある場合にのみ行われるにすぎません。
製品の特長:EtherCAT Network Simulation
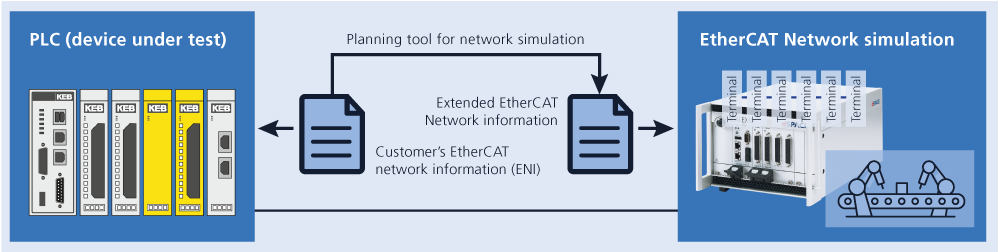
dSPACE EtherCAT Network Simulationを使用すると、コントローラが通信の差異に一切気付かないような形でEtherCATネットワークをシミュレートすることができます。
機能
EtherCAT Network Simulationは、コントローラからEtherCATフレームを受信したうえで修正しますが、それらへの応答は、EtherCAT参加者をパススルーするかのような形で行います。そのため外部からは、コントローラとdSPACEシステムの二者のみが通信しているように見えます。
スケーラブルな詳細レベル
FPGAを搭載したdSPACE SCALEXIOシステムを使用すると、ネットワーク参加者やそれらに接続された制御対象システムをさまざまな品質レベルでシミュレートすることができます。また、各種のFPGAボードも提供されているため、極めて高速なプロセスのシミュレーションも可能です。
仮想コミッショニングをリアルタイムに実行
リアルタイムな仮想コミッショニングにおいては、デジタルツインにプラットフォームと通信インターフェースが提供されます。これらを使用すると、実機と同期したタイミング動作が可能になり、PLCコードを現実に即してテストできるようになります。また、詳細レベルの変更も可能なため、エネルギーフローをシミュレートして、供給エネルギーの利用状況などを確認することもできます。さらに、実際のデバイスへの適用前や実際のデバイスの入手前に、ネットワーク参加者のパラメータ設定やソフトウェアのアップデートをテストできるという利点もあります。
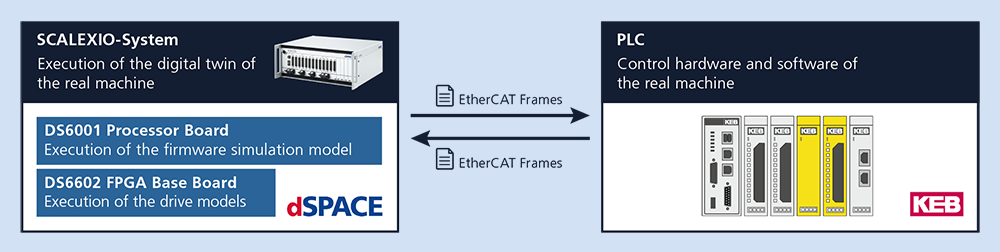
dSPACE SCALEXIOによるファームウェアのシミュレーション
これに対し、dSPACE SCALEXIOリアルタイムシステムは、最大16 kHzのスイッチング周波数を持ち、高性能プロセッサやFPGAユニットも搭載しているため、ドライブコントローラとモーターモデルで構成されたパワー駆動用システム(PDS)全体を動作させることが可能です。これにより、電源出力ステージに至るまでのシミュレーションをおおむねリアルタイムに実行できます。また、エミュレートされたフィールドバスやリアルタイムEthernetインターフェースを追加すれば、電力フローを考慮した仮想コミッショニングも可能であり、このシミュレーションを通じてプラント設計を最適化することもできます。この目的のため、dSPACE Fieldbus SolutionはEtherCAT Network Simulation(情報ボックス)を組み込めるよう拡張されています。これにより、SCALEXIOシステムから実際のPLCを用いてフィールドバスやリアルタイムEthernet経由であらゆる詳細が含まれたファームウェアシミュレーションモデルを操作することも可能です。まとめと今後の展望 KEB Automation社では、SCALEXIOシステムの性能を活用し、それに仮想EtherCATスレーブ向けのFieldbus Solution(情報ボックス)の拡張機能を組み合わせることにより、新たな適用分野を開拓しています。同社は現在、HILシミュレーションによるKEBドライブコントローラのテスト環境を拡張して、KEBファームウェアのSILシミュレーションを組み込めるようにしています。そのため、HILシミュレーションの開始前でも、ファームウェアコードのプログラミングエラーを検出し、修正することができます。同社は、ファームウェアシミュレーションモデルのポートフォリオをKEBドライブコンバータにも拡張する予定です。また、ファームウェアシミュレーションモデルは将来的にFunctional Mock-up Unit(FMU)としても提供される見込みです。
dSPACE SCALEXIOリアルタイムシステムを用いた仮想コミッショニングにより、工業機械用コントローラのPLCコードにおけるプログラミングエラーを開発の早期の段階で検出し、修正することができます。

まとめと今後の展望
KEB Automation社では、SCALEXIOシステムの性能を活用し、それに仮想EtherCATスレーブ向けのFieldbus Solution(情報ボックス)の拡張機能を組み合わせることにより、新たな適用分野を開拓しています。同社は現在、HILシミュレーションによるKEBドライブコントローラのテスト環境を拡張して、KEBファームウェアのSILシミュレーションを組み込めるようにしています。そのため、HILシミュレーションの開始前でも、ファームウェアコードのプログラミングエラーを検出し、修正することができます。同社は、ファームウェアシミュレーションモデルのポートフォリオをKEBドライブコンバータにも拡張する予定です。また、ファームウェアシミュレーションモデルは将来的にFunctional Mock-up Unit(FMU)としても提供される見込みです。
Manuel Brose氏、KEB Automation社

KEB Automation社について
KEB Automation社は、実績あるドライブテクノロジのサプライヤとして、プラスチック機械、木材加工、プロセス技術、社内物流、または風力エネルギーや電動化モビリティなど、さまざまな分野向けの自動化ソリューションを開発しており、制御装置や駆動装置のHMIからモーター、ギア、ブレーキに至るまでの完全なソリューションを提供しています。バルントルプ(NRW)に本社を置くKEB Automation Groupは、1972年から同族企業として世界規模で活動し、12の子会社と50以上のパートナー企業で約1,500人の従業員を擁しています。
