超高分解能イメージレーダーセンサは4Dレーダーと呼ばれることも多く、レーダー環境の詳細なイメージを幅広い視野、高度、距離範囲、速度情報で提供します。これらのレーダーセンサをテストする際に使用するレーダーシミュレータには、性能や帯域幅に厳しい要件が課されます。dSPACE Automotive Radar Test System(DARTS)9040-Gは、強力な高周波テクノロジを活用してこれらの課題に対応することに成功した最初のシミュレータです。
運転支援や自動運転では、環境をどう検出するかが極めて大きな技術的課題となります。交通状況がどれほど複雑で予測不能な場合でもすべて適切に対応できる自動運転車両を実現するには、周囲を360度見渡せる信頼性の高いパノラマビューが必要であり、これにはレーダーセンサが重要な役割を果たします。従来のレーダーセンサは通常、物体の速度、距離、および水平方向の幅を検出し、3次元の空間として検出できるのは限られた範囲のみです。また、物体の仰角方向の幅については、おおよその値を推定することしかできません。
新しいテクノロジ:4Dレーダー
自動車業界では、高分解能レーダーの開発を推進しており、仰角角度も正確に検出することにより検出した物体のイメージのリアリティを総合的に高めようとしています。そのため、レーダーは事実上3Dイメージングテクノロジを搭載した機器となっており、速度も第4の計測項目として追加されています。これらのセンサは4Dレーダーとも呼ばれており、いかなる天候や照明条件においても高精度かつリアルタイムで物体を検出できるようにするうえでの基盤となっています。
高度なテストシステムの要件
従来のレーダーは一般的に動作帯域幅が最大で1 GHzでしたが、超高分解能レーダーは通常、高周波信号を使用して追加の情報を送信するために4 GHzという特に広い変調帯域幅で動作しています。そのため、このようなレーダー向けの新しいセンサを総合的にテストしたり妥当性確認したりする場合には、テストシステムに対する性能要件が大幅に高まります。つまり、レーダーが動作する4 GHz以上の帯域幅に対応したテクノロジを実装し、エッジケースの挙動を正確に分析できるシステムが必要となるということです。遠く離れたところを高速に移動するさまざまな大きさのターゲットをラボの条件下でリアルタイムにシミュレートするために使用するレーダーターゲットシミュレータでは、特にこれが重要になります。
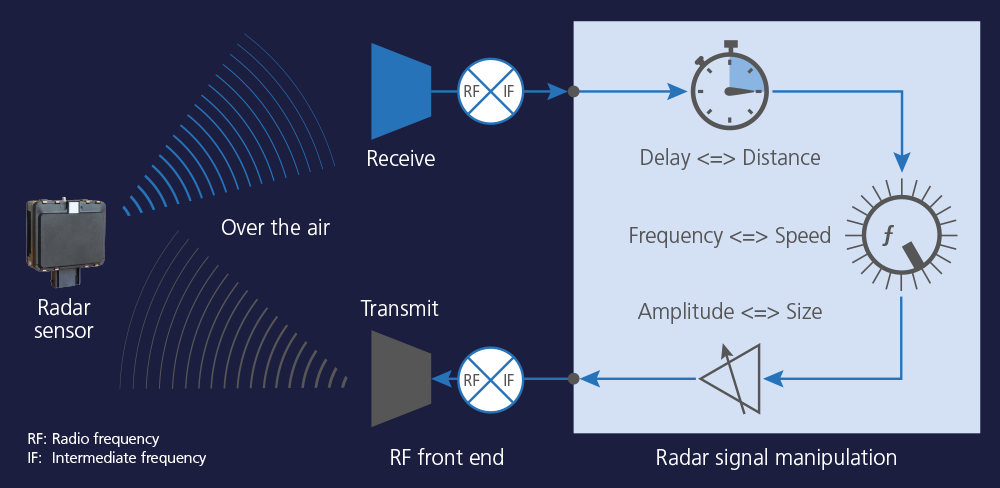
The over-the-air method: The DARTS receives the radar waves from a radar sensor, generates a freely definable echo, and sends it back to the sensor.
5 GHzの帯域幅を備えた最初のレーダーシミュレータ
dSPACEでは、開発パートナーであるITS社およびmiro•sys社と協力して、5 GHzの帯域幅で動作する世界初のレーダーシミュレータを設計しました。新たなDARTS 9040-Gは、イメージングレーダーや4Dレーダーなど、次世代のあらゆる自動車用レーダーに対応するよう設計および最適化されており、シンセサイザによる中心周波数の調整なしで77 GHzのレーダー帯域を完全にカバーします。また、ダイナミックレンジが極めて高いうえにスプリアスがなく、雑音レベルを特に低く抑えることができるため、あらゆる77 GHzレーダーに最適です。さらに、使いやすい無線テクノロジにより、チップの設計段階やセンサの開発段階から完成車量産ライン(EOL)テストに至るまで、すべての開発段階で使用できます。新しいDARTS 9040-Gには、さまざまな開発および量産段階における多様なテスト要件に合わせて調整された複数のバージョンがあります。


製品の特長:車載レーダーセンサの無線テストに対応したレーダーターゲットシミュレータ
- イメージングセンサや4Dレーダーセンサ用に最適化
- 自由に定義可能なレーダーターゲットの反射波をシミュレート(ターゲットを追加で拡張可能)
- 距離、相対速度、幅、および高度をシミュレート
テクニカルデータ
- 周波数帯:76~81 GHz
- 帯域幅:5 GHz
- 距離範囲:≤ 2.5~300 m
- 距離範囲の最小調整単位:2.5 cm
- 相対速度:±500 km/h
