HILテストとは
HIL(Hardware-in-the-Loop)テストとは、シミュレートされた現実的な環境で実際のECU(電子制御ユニット)をテストすることを指します。これらのテストは再現可能な形式であり自動化できるため、ラボで365日24時間体制で総合的なテストを行えるだけでなく、妥当性確認の期間を短縮したり、広範囲のテストシナリオに対応したりすることができます。また、テスト対象デバイスや周辺環境に安全上の問題を引き起こすことなく、重大なコーナーケースのテストを実施することができます。
HILテストの利点
- 小規模なテストシステムから大規模なテストシステムに拡張可能
- 車両全体のシミュレーションや実際のコンポーネントの統合
- 通信テスト
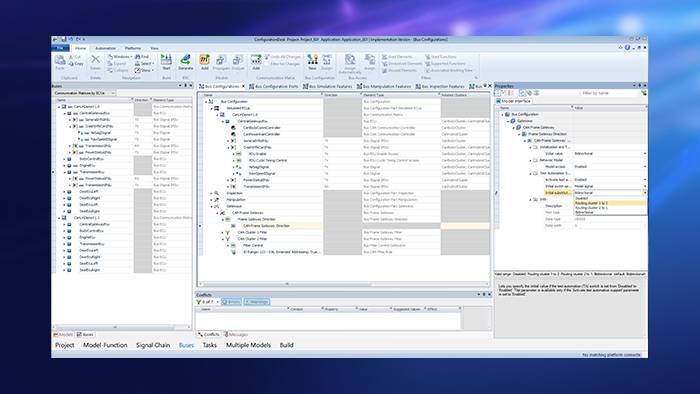
- バスおよびレストバスシミュレーション

一般的なHILテストシステム
HILシステムは、シミュレーションハードウェアと付属のソフトウェアで構成されます。HILシステムには、テスト対象のユニットが接続されます。通常、このユニットは、テストされる新しい制御ロジックまたはECUソフトウェアを含む1つ以上の電子制御ユニット(ECU)です。使用事例によっては、さらにステアリングシステムやブレーキシステムなど、実際のハードウェアコンポーネントをテストシステムに追加することもできます。
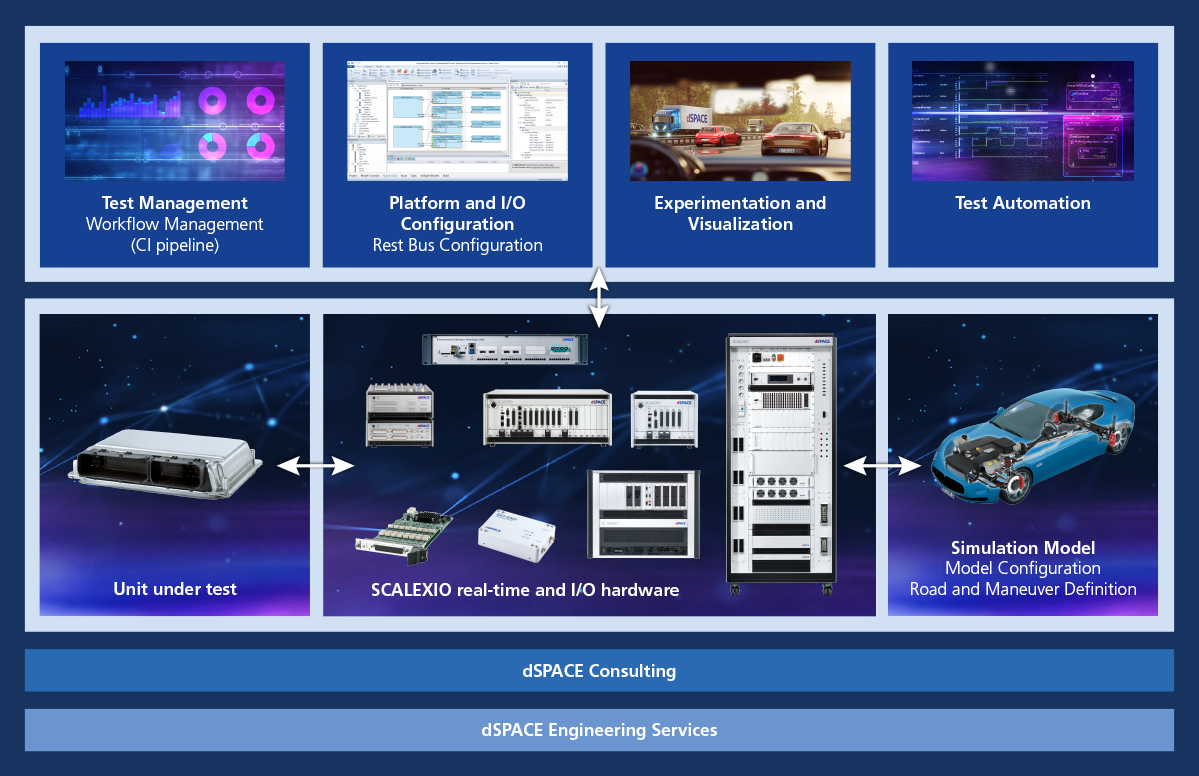
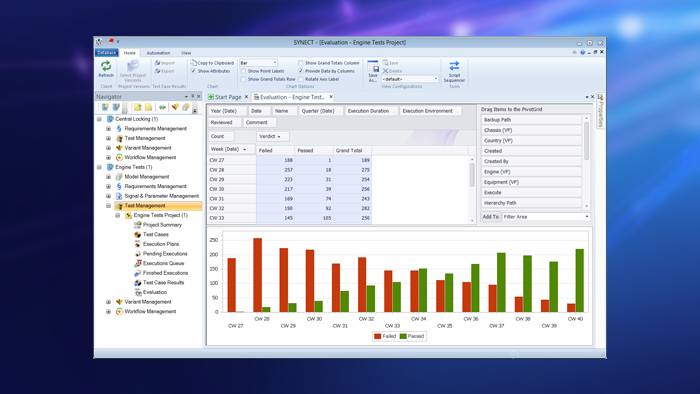
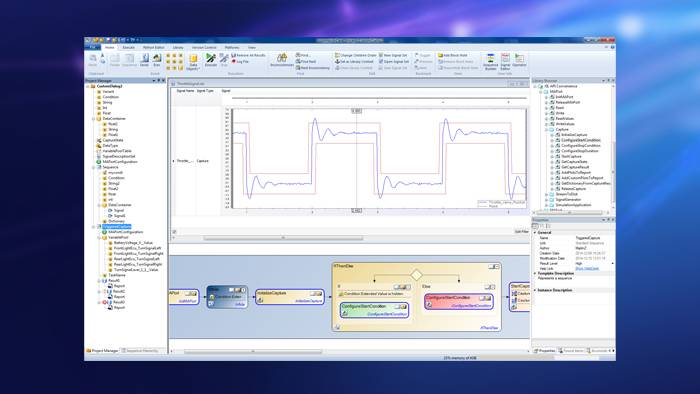
テストマネージメント
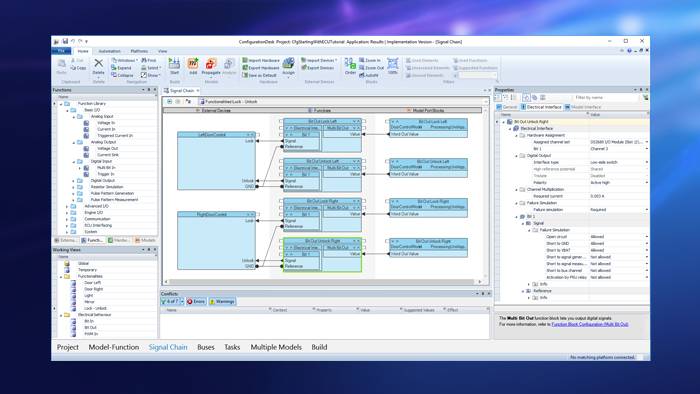
プラットフォームおよびI/O設定
試験およびビジュアル表示
テストオートメーション
SCALEXIOリアルタイムハードウェアおよびI/Oハードウェア





シミュレーションモデル


詳説 – HILシミュレーションのテスト段階とテストシステム

機能テスト
機能テストでは、ECUベーシックソフトウェアとの相互作用を含めた、単一または少数の機能のテストに重点が置かれます。この種のテストは通常、最終的なリリーステスト以上に機能開発に不可欠な要素です。そのため、テストの主眼は試験的使用に置かれており、体系的なテストオートメーションは行われません。したがって、機能テスト用のHIL(Hardware-in-the-Loop)テストシステムには、汎用バスおよびネットワークインターフェース、動作レベルおよびプロトコルレベルでのレストバスシミュレーション、テスト用設計インターフェース(XCPなど)が必要となります。多くの場合、この種のテストは機能開発者自身が行います。また、テストシステムは開発者のデスク上に設置できることが必要です。

ECUコンポーネントテスト
ECUテストの一般的な用途は、ソフトウェアの統合テストからフェールセーフおよびフェールオペレーショナルテスト、ECUリリーステストまで多様です。そのため、テストは高度に自動化されており、ECUの要件に基づいて多数のバリアントに対応できるようになっています。
ECUをテストするためのテストシステムには、電気的欠陥シミュレーションを含むスケーラブルなI/Oおよびバス/ネットワークインターフェースが必要です。また、バスやネットワークのテストには、動作レベルやプロトコルレベルでのレストバスシミュレーション、および広範な操作が必要です。
実際のコンポーネントのテストでは、総合的なプラントモデルやシミュレーション性能を必要に応じて向上させることができなければなりません。テストシステムの機能は、変化するプロジェクト要件に合わせて調整できるのが理想的です。

ECUドメインおよびネットワークテスト
ECUドメインおよびネットワークのテストでは、分散化した機能のエンドトゥエンドテストを行います。これには、スリープテストやウェークアップテストに加え、車両のECUネットワークのフェールセーフテストやフェールオペレーショナルテストが含まれます。この種のテストシステムでは、幅広いI/Oチャンネルとバスおよびネットワークインターフェースが必要となります。
複数のリアルタイムシステムがクラスタ化された環境では、多数のプラントモデルを同期させて処理する必要があります。複雑なモデルやシナリオに対処するために、強力なシミュレーション性能やマルチプロセッサ機能が必要です。
ECUネットワークのテストシステムでは高度に自動化されたテストプログラムを昼夜実行することも多くありますが、これは総合的なテスト管理システムによって可能になっています。

電動化モビリティ



自動運転

コアテクノロジ




オンロードおよびオフロード商用車

航空宇宙産業



産業オートメーションおよび輸送


お客様の声
コンポーネントの垣根を超えるdSPACE HILシステムのおかげで、私たちはステアリングやブレーキなどの機械コンポーネントをセンサと直接連携させてテストし、すべてが適切に協調して動作しているかを確認できるようになりました。dSPACEソリューションの最強の利点は、完璧にシンクロする時間同期および完全なクローズドループでのセットアップです。

多数の予備テストをHILシステムで行えたおかげで、最初にリリースされたFCUのソフトウェアは即座に動作しました。すべての基本的な入出力だけでなく、クローズドループの制御ループも確認することにより、実際のシステムへの実装前にソフトウェアの正常な動作を確保することができました。

私の見解では、dSPACEは市場で最も優れたHILハードウェアおよびソフトウェアを提供するベンダーです。総じて、dSPACEのHILシステムには非常に満足しており、これらが当社のソフトウェアテスト能力の向上に大きく貢献しています。



