dSPACE ADTF Interface Blockset
Développement de systèmes d'aide à la conduite avec des capteurs environnementaux
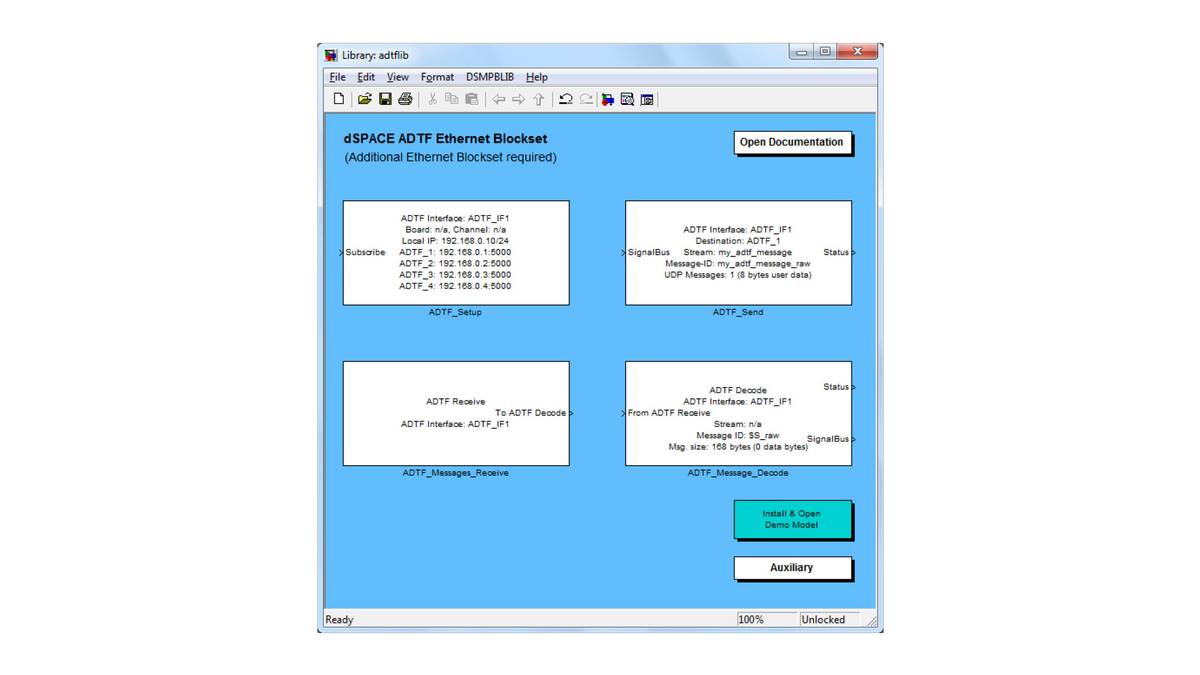
Le blockset dSPACE ADTF Interface Blockset est utilisé pour implémenter la communication à faible latence et bidirectionnelle entre l’EB Assist d’ADTF et VEOS®, la plate-forme de simulation basée sur PC ou les systèmes temps réel de dSPACE au moyen de l'ADTF Message Bus.
- Interface entre les plates-formes dSPACE et l'EB Assist ADTF
- Communication bidirectionnelle et à faible latence au moyen de l'UDP/IP et de l'ADTF Message Bus
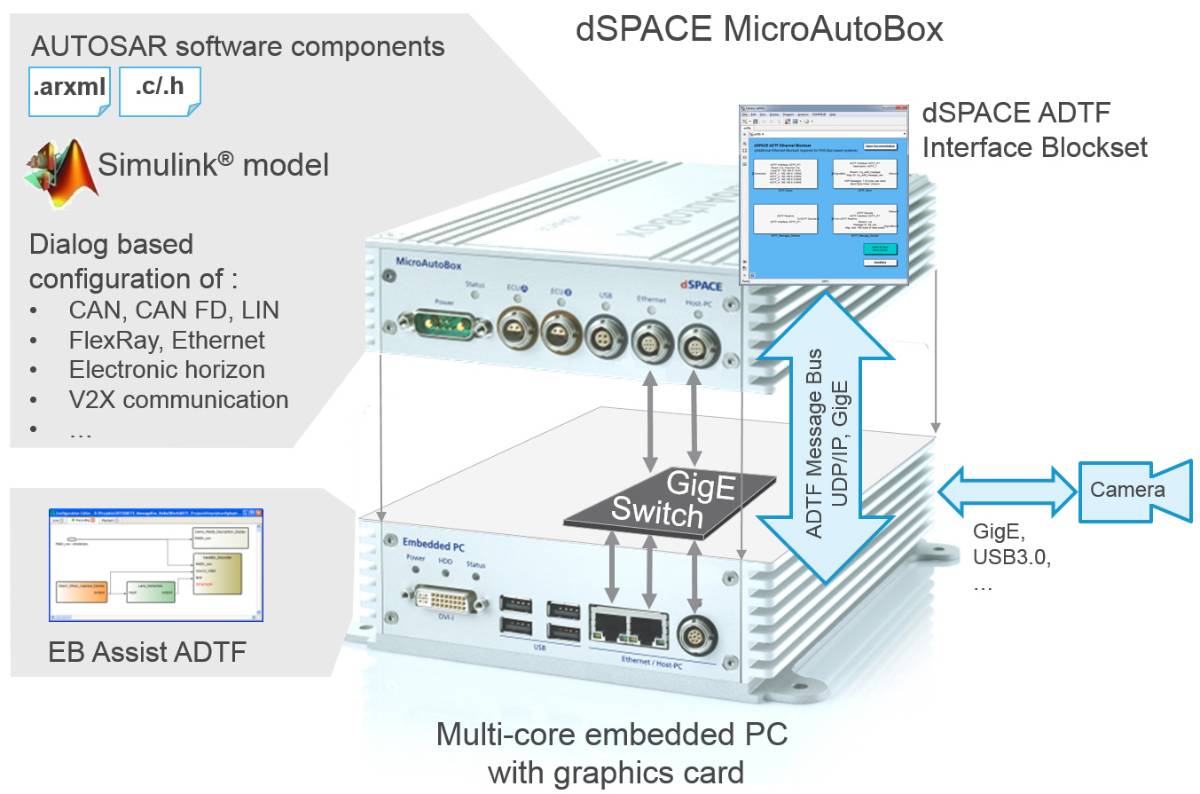
- Intégration aisée des capteurs d'environnement tels que des caméras


Bref aperçu
Les systèmes avancés d'aide à la conduite (ADAS) et les fonctions de conduite autonomes exigent des données complètes de l'environnement du véhicule qui peuvent être capturées en utilisant, par exemple des capteurs vidéo et radar. Lors du prototypage des fonctions logicielles associées, les données provenant des différents capteurs doivent être traitées et fusionnées avant que les objets détectés soient disponibles aux fonctions de l'application en cours.
Les fonctions de perception sont généralement implémentées en utilisant un langage de programmation de haut-niveau tel que le C++, alors que le développement de fonctions d’application repose sur l’approche de conception basée sur modèle utilisant MATLAB®/Simulink®.
EB Assist ADTF (Automotive Data and Time-Triggered Framework) est un outil établi qui peut être utilisé pour les tâches telles que le développement de fonctions de perception. De plus, il fournit une méthode pratique pour associer de nombreux systèmes grâce à l'ADTF Message Bus basé sur UDP/IP.
Le blockset dSPACE ADTF Interface Blockset est utilisé pour implémenter une communication bidirectionnelle et à faible latence entre les plates-formes dSPACE telles que VEOS ou la MicroAutoBox de dSPACE équipée de l’EB Assist ADTF au moyen du ADTF Message Bus. Ce blockset requiert le matériel et les logiciels adéquats disponibles à partir de la Release 6.5 de dSPACE ou suivantes pour la connexion Ethernet, plus l’EB Assist ADTF fourni par ElektroBit.
- Ventes Notre équipe d’ingénieurs d’affaires vous assistera dans le choix de votre système dSPACE. Ils vous fourniront également les tarifs et toutes les informations souhaitées concernant d’autres produits dSPACE.
- Achat de logiciels dSPACE Informations sur le téléchargement, l’installation et le système de licence des logiciels dSPACE
Faire avancer l'innovation. Toujours à la pointe de l'évolution technologique.
S’abonner à nos newsletters, gérer ses abonnements ou se désabonner. La newsletter mensuelle contenant toutes les informations liées à l’aéronautique et défense.