Traction Motor Inverter Testing
- Scalable hardware for customized applications
- Testing traction motor inverters with real currents
- Integrated failure insertion
- Changing motor parameters mid-test with just one click

Task
Yes, you can test all components of a powertrain for electric vehicles, such as the battery, drivetrain, and inverter, in a real car and in a real environment. Or you can use all the advantages of simulation with power-hardware-in-the-loop (HIL) systems. Ready-to-use solutions let you simulate an environment for all your electric vehicle components, e.g., traction motor inverters, helping you test and improve the components before in-vehicle tests.
Challenge
The simulation systems has to provide failsafe, faultless, and energy-efficient inverters. To achieve this, the real required battery voltage and motor current have to be injected into the system. A good simulation environment also emulates parameters such as water cooling and interfaces for sensor signals.
Solution
dSPACE offers a sophisticated, highly scalable system for testing and improving electrical components of powertrains, such as traction motor inverters.
Using multiple high-voltage electronic loads in parallel makes it possible to generate several megawatts of power. One emulator cabinet can hold up to 18 high-voltage electronic load modules.
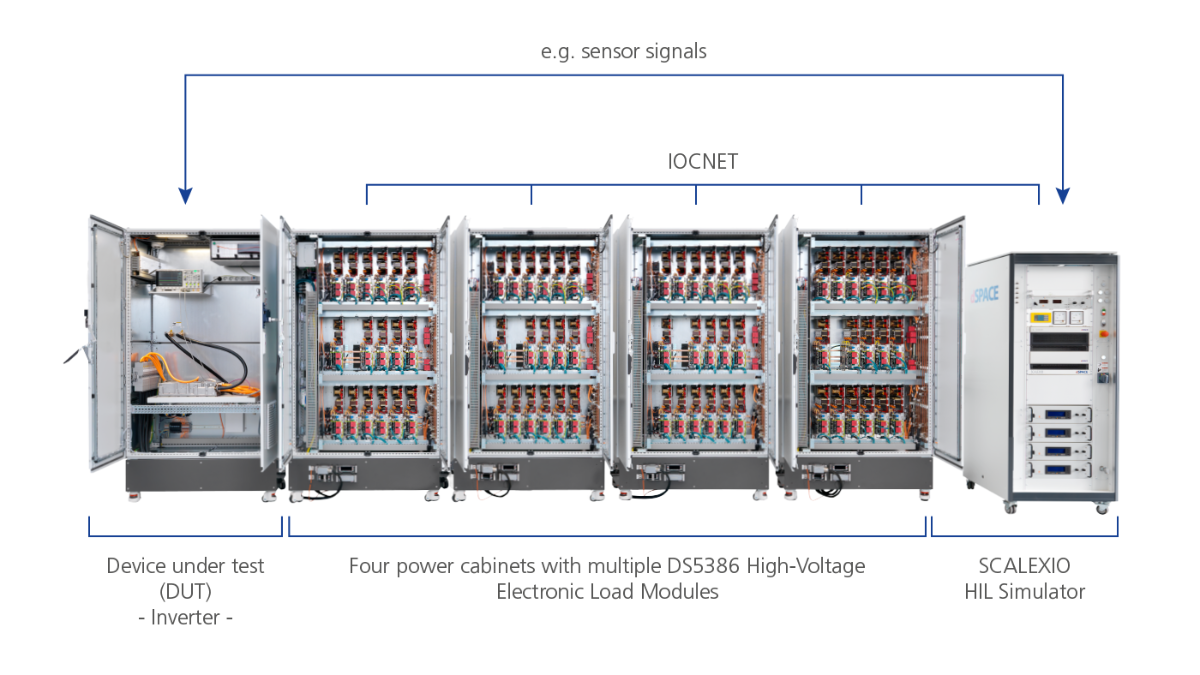
Each emulator cabinet is connected to a SCALEXIO simulator using the dSPACE network technology IOCNET. This technology allows for fast, low-latency communication with the SCALEXIO real-time processor. Thanks to the powerful SCALEXIO Processing Unit and FPGA-based motor emulation, there are no limits to simulation and emulation. The emulation uses FPGA-based motor models and supports various motor types, including induction motors (IM), brushless DC motors (BLDC), separately excited synchronous motors (SESM), and permanent magnet synchronous motors (PMSM). All operating points of an electric motor can be emulated, in both motor and generator mode. In addition to the fundamental frequency, it is also possible to emulate higher-order harmonics for the simulation of nonlinear motor characteristics (5th, 7th, 11th harmonic).
Example Configuration for a Hypercar Traction Motor
- Motor phase current: 1,200 ARMS (1,440 APeak)
- Battery current: 780 A (1,080 APeak)
- Four power cabinets with multiple DS5386 High-Voltage Electronic Load Modules
- Real-time models:
- Battery model from the ASM Electric Components library
- Electric motor model from the dSPACE XSG Electric Components library
| Parameter | Specification1) |
|---|---|
| Integrated emulator hardware |
|
| Size (width x height x depth) |
|
| Power (for 1,000 V systems) |
|
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.