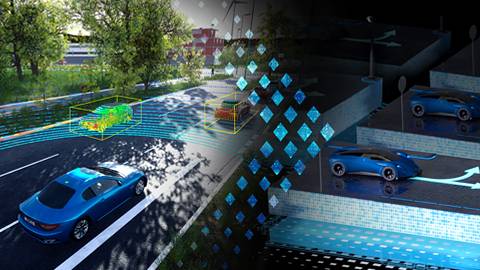
Providing a safety rating for autonomous vehicles is very time-consuming and complex due to the almost limitless number of possible traffic scenarios. The solution for simulation scenario generation developed by dSPACE and understand.ai lets you transfer recordings from real test drives into the simulation and hence perform thousands of tests of safety-critical and realistic driving scenarios with dedicated hardware and software conveniently as a simulation.

Our Solution Highlights
- Elevate your test and validation activities with real-world scenarios
- Cost- and time-efficient reuse of available measurement data
- Exact and consistent reproduction of real-world scenarios in simulation
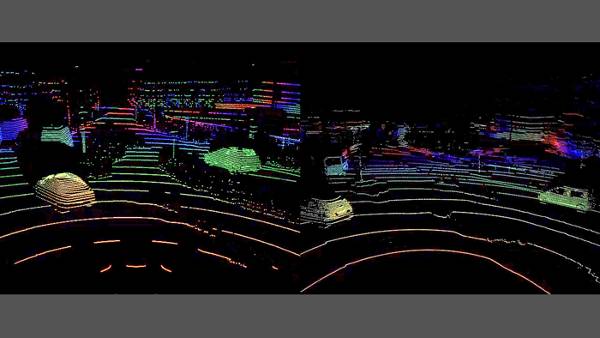
- Road generation based on sensor data
- Generation of logical and replay scenarios for scenario-based testing
- Real-world scenarios in AURELION (physics-based sensor simulation)
- Scenarios for SIMPHERA (Solution for AD simulation and validation)
- Support of OpenSCENARIO and OpenDRIVE

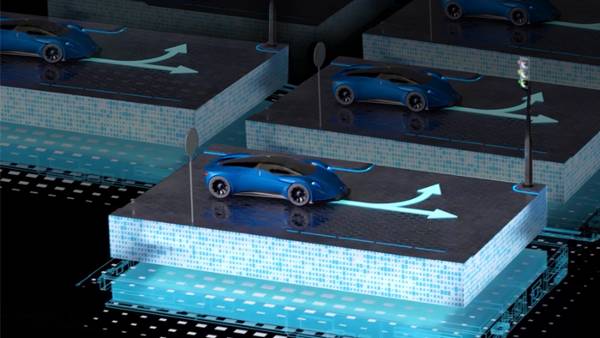
Use vehicle sensor raw data, object lists, or datasets to generate simulation scenarios that simulate the real world:
- Progressively build up your scenario database with important scenarios matching your operational design domain
- Use recorded data for scenario-based testing to find new corner cases
- Validate your models and simulations
- Debug critical situations experienced during test drives in simulation
- Continuously virtualize scenarios to enhance the test coverage of your operational design domain


Reducing the unknown risks – Scenario Generation in Data-Driven Development
The successful homologation of functions for automated driving heavily relies on the smart and efficient integration of real-world data into the validation process. As your partner in simulation and validation, dSPACE provides solution for data-driven development in all stages of the process.
With our solutions for data driven development dSPACE helps to continuously reduce the unknown risks – and hence improve safety – by making experiences from real world test drives accessible in your validation process at scale.
As a key component in the data-driven development process, the scenario generation service provides the basis for simulation-driven homologation, including scenario-based testing and coverage analysis of your Operational Design Domain.