dSPACE Solution for PC- and Cloud-Based Simulation
With the dSPACE solution for SIL testing, you can significantly accelerate your software development and test process. Benefit from our powerful solution no matter your individual use case. From classic automotive applications, such as powertrains or braking systems, to e-drive applications and functions for autonomous driving – You can rely on the innovative dSPACE solution.
Our end-to-end solution lets you generate and import your code as the system under test and connect it to other simulation parts, such as virtual electronic control units (V-ECUs), plant models, and environment models. Using our simulation platform and validation solution, you can simulate and test everything together on your PC or in the cloud. For each part of this tool chain, a corresponding dSPACE solution is available. However, we can also integrate third-party tools into a tool chain that is optimized for your needs.
dSPACE – Your partner in simulation and validation.
Our Solution Highlights
- Integrated end-to-end test environment for SIL testing across multiple development stages and for different application areas, from early software tests and frontloading of test preparation tasks to the comprehensive validation of entire systems
- Open SIL solution where you can get all parts from dSPACE, but can also use them with third-party elements
- Seamless transition between SIL and HIL, e.g., for reusing your SIL/HIL tests
- Experience from many customer projects – We are your partner for building up a SIL simulation environment tailored to your needs
The result: more efficiency, productivity, and reliability for your innovations!

System Under Test
The developed software is the core of any validation and is thus called system under test (SUT). dSPACE supports you in preparing your SUT for simulation and integration in the simulation system, no matter your requirements.
Our SIL solution allows for the virtualization and integration of both classic ECUs and high-performance computers (HPCs). In addition, V-ECUs are supported at all levels, including algorithm models, V-ECUs on the application layer, or those with basic software.
SUTs can be created either with dSPACE tools or with third-party tools and then be integrated as Functional Mock-up Units (FMUs), for example.

Simulation Models (Plant/Environment/Restbus)
Plant, environment, and restbus models provide the system under test with realistic input to achieve highly realistic testing.
dSPACE provides comprehensive simulation models for a wide range of application areas, such as combustion engines, vehicle dynamics, electric components, sensors, and the traffic environment. Of course, you can also use your own existing models.

Simulation and Integration Platform
In the simulation and integration platform, all parts of the simulation system, such as simulation models, restbus simulation, and the system under test, are executed together.
dSPACE offers a scalable platform that can be used on different operating systems such as Linux or Windows and is open to integrate all kinds of models, virtual ECUs, and third-party components.

Validation Solution
The dSPACE validation software enables you to plan, execute, and automate your tests no matter your test method, e.g., whether you use requirement- or scenario-based testing. Depending on your needs, you can run single tests or complete test campaigns in parallel in the cloud.
All test tools are available from dSPACE – But of course you can also integrate third-party tools.




Virtual ECUs

A virtual ECU (V-ECU) is software that represents a real ECU in a simulation. Unlike a soft ECU, which uses only a simplified Simulink®/Stateflow® model, a V-ECU consists of real production code. It consists of code only and does not require any special hardware. In SIL scenarios, V-ECUs are used instead of real ECUs or controller models.
- V-ECUs can have different levels of abstraction, depending on what they are used for:
- V-ECUs at the application level contain selected parts of the application software, the operating system, the RTE and required parts of the basic software typically provided by dSPACE.
- V-ECUs can also include the application software and parts of the production basic software, such as Dem, NvM, and COM.
- V-ECUs can include the complete application software and hardware-independent basic software, except modules for the Microcontroller Abstraction Layer (MCAL).

- There are different ways to create a V-ECU, depending on what they are used for, the project needs, and on whether the development is based on AUTOSAR:
- Function and software developers who only work with single components can create a V-ECU directly with Simulink or TargetLink. The result is a simple V-ECU with only a specific part of the application layer of the ECU software. It enables basic functional tests.
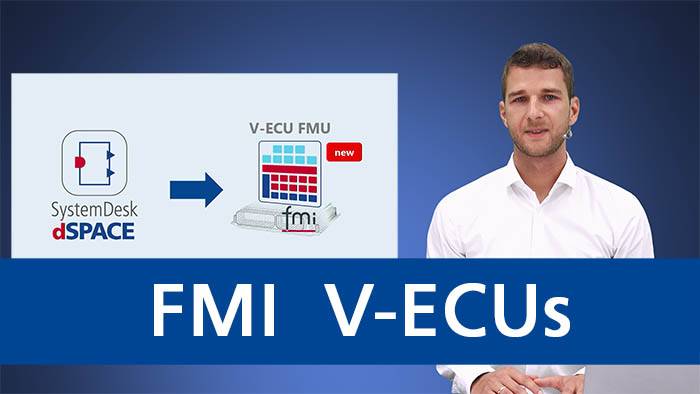
- Software integrators who want to test a more complex network of functions can combine software components, functions or non-AUTOSAR code from different sources in SystemDesk to create the ECU’s software architecture. They can then use the SystemDesk V-ECU Generation Module to create a complete V-ECU. This includes the run-time environment (RTE) and, if needed, basic software in addition to the application layer. The V-ECUs are used for PC-based simulation with VEOS.
Versatility by Supporting Automotive Standards
VEOS can easily be integrated into existing tool chains because it supports various automotive standards. Therefore, you can keep existing tools when you add VEOS to your rapid control prototyping or HIL tool chain to perform XCP XIL API PC-based simulation. By using dSPACE software and hardware, you gain high flexibility and investment protection for new projects and challenges.
ASAM XIL API
In July 2009, ASAM (Association for Standardization of Automation and Measuring Systems) released the new XIL API standard, defining an interface to connect test automation tools like AutomationDesk with any simulation platform, such as VEOS or SCALEXIO. The standard enables truly platform-independent test development.
AUTOSAR
AUTOSAR (AUTomotive Open System ARchitecture) is a de-facto open industry standard for automotive electric/electronic (E/E) architectures. dSPACE joined the AUTOSAR partnership as a Premium Member in April 2004 and is active in defining and developing parts of the architecture and its specifications.
Functional Mock-up Interface (FMI)
The Functional Mock-up Interface (FMI) is an open standard for the exchange and integration of plant models provided by different tool vendors. dSPACE has signed the Codex of PLM Openness and works actively in the ProSTEP Smart Systems Engineering project, the Modelica Association FMI project to further develop the FMI standard, and the Modelica Association project for System Structure and Parameterization of Components for Virtual System Design (SSP).