How do you safely test an automated, real vehicle under safety-critical conditions? This question can be vividly answered with the VIL test system developed by CATARC and dSPACE, which bridges the gap between simulation and road testing.
For automated vehicles, safety is their most important asset. Throughout the development and life cycle of such a vehicle, test tasks arise in which the real vehicle must be tested together with its sensor technology. Due to the immense complexity of automated vehicles, there are multiple challenges involved with performing these tests thoroughly, yet efficiently. To accomplish the test task, CATARC and dSPACE have designed a process and a test system that enable simple, fast, and detailed testing. The system solves challenges that arise when the real vehicle has to be validated. This form of validation is required during test tasks in end-of-line testing, periodic technical inspections, homologation, and after-market.

Testing Automated Vehicles Thoroughly and Efficiently
The aim of the tests is to easily and efficiently test autonomous vehicles and validate their function. The goal is to ensure the correct functioning of sensors, control units, and actuators. Tests in hazardous situations are of particular interest, as they can end catastrophically if the behavior is incorrect. Such scenarios can be implemented and evaluated particularly well with simulations. For example, in a software-in-the-loop (SIL) simulation, the vehicle under test drives in a virtual world and the behavior of its automated driving control system is analyzed in detail in virtual traffic scenarios. In order to test a real vehicle with such safety-critical scenarios, an ingenious solution brings together the real and the simulated world: The vehicle to be tested is located on a chassis dynamometer connected to a simulator. The simulator generates the virtual world consisting of roads, surrounding traffic, traffic signs, pedestrians, etc. This virtual world is converted into physical variables (radar waves, images) with which the sensors of the autonomous vehicle are stimulated. The signals of physical variables of the chassis dynamometer, such as speed, acceleration/deceleration, are in turn fed into the simulator, thus closing the control loop. This test method is referred to as vehicle-in-the-loop (VIL) testing. It closes the gap between hardware-in-the-loop (HIL) simulation and test drives.
dSPACE has provided our development department with a comprehensive solution for vehicle-in-the-loop (VIL) testing, which is successfully used for dynamic, scenario-based testing of automated real vehicles.

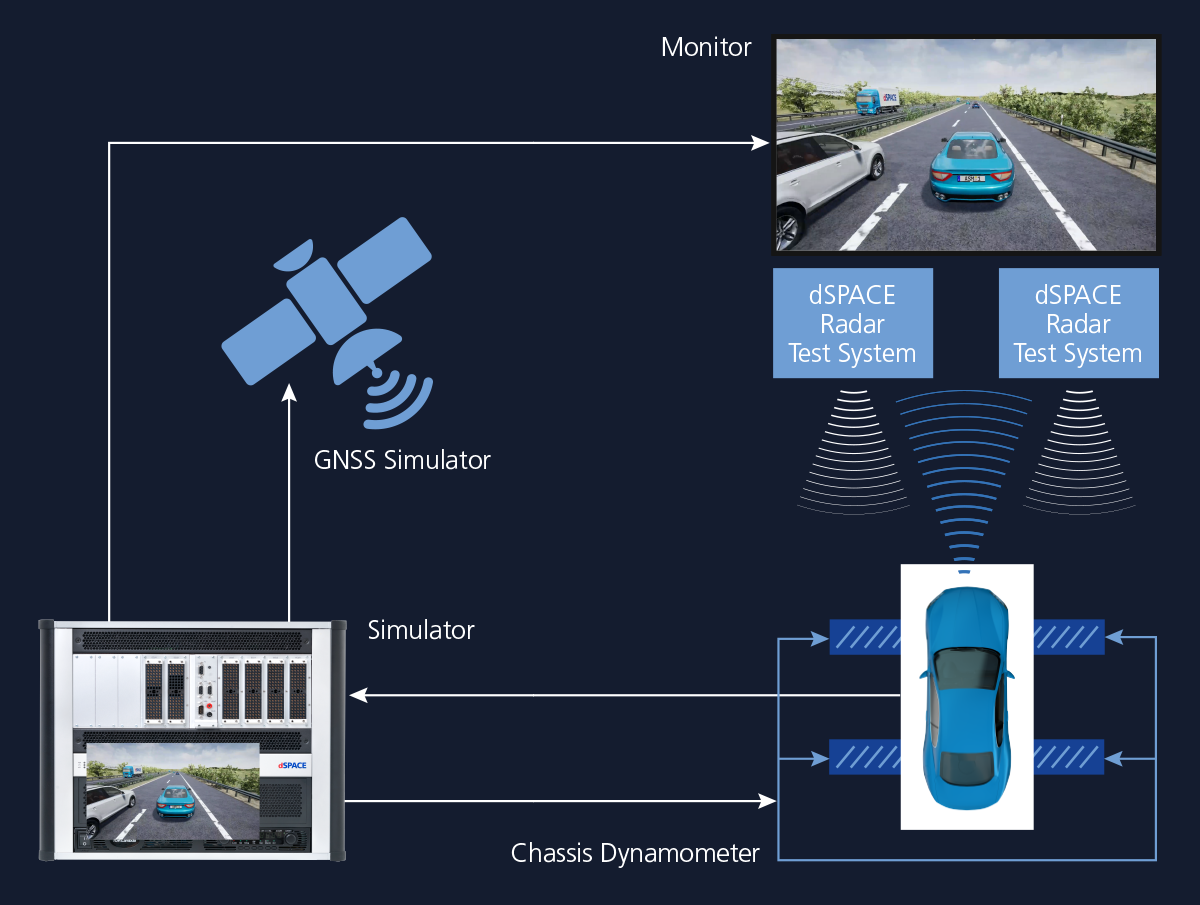
Setup of the VIL test system. All sensors are stimulated over the air by the simulation. The variables measured on the chassis dynamometer are entered in the simulation.
The VIL Test Bench Takes the Whole Vehicle
A VIL test bench of this dimension is complex and comprises a large number of different components that have to work together synchronously with high precision. In its search for suitable solution providers, FAW Hongqi was convinced by the many years of development and validation experience of dSPACE and CATARC in the field of X-in-the-loop simulation. Together, they developed a customized VIL simulation system for FAW Hongqi. It consists of proven simulation solutions from dSPACE and a chassis dynamometer from German test bench specialist Dürr. The virtual vehicle environment is simulated in real time using models from the Automotive Simulation Models (ASM) tool suite on a SCALEXIO system. The SCALEXIO simulator is connected to the following simulation components to act as physical variables for the vehicle sensors in the virtual world and output them over the air:
- Two dSPACE Automotive Radar Test Systems (DARTS) 9040-G for stimulating the radar sensors
- One monitor that is supplied with image content via the dSPACE animation software. The content is captured and evaluated by the camera sensor.
- A global navigation satellite system (GNSS) simulator for navigation system positioning
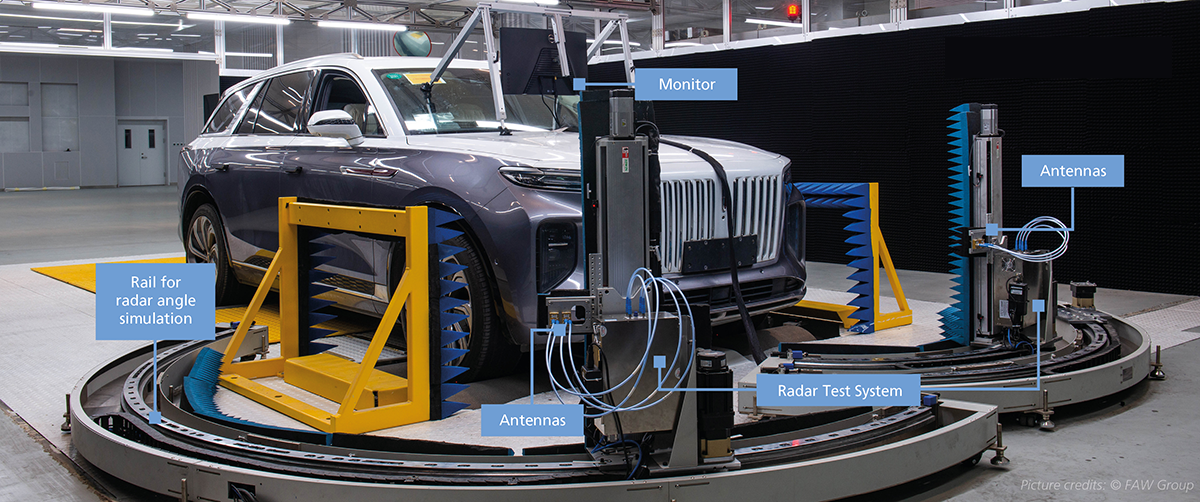
The two DARTS are mounted on rails that allow angle simulations of radar targets in dynamic traffic scenarios. The x-road-curve chassis dynamometer simulates the road. It also enables steering movements of the front axle so that laterally acting assistance systems can also be tested. Together with Dürr, dSPACE had already worked out a functioning solution for coupling the simulator and chassis dynamometers, so it was possible to use a technically mature concept.
What does the VIL test system do?
The vehicle-in-the-loop (VIL) simulation system is designed for comprehensive testing of automated vehicles. It is successfully used for function validation of driver assistance systems, such as:
- Adaptive cruise control (ACC)
- Automated emergency braking (AEB)
- Traffic sign recognition (TSR)
- Lane keeping assistants (LKA)
- Adaptive light control (ALC)
- Traffic jam assistants (TJA)
- Highway assistants (HWA)
It also provides solid support for the validation of intelligent automated driving systems. With the VIL test system, FAW Hongqi achieves its goal of creating virtual dynamic test scenarios for the real vehicle to complete the validation and verification of the functional integration of the intelligent driving system at the vehicle level. With the options available in ASM, the test scenarios can be constantly expanded. All tests can be performed automatically and reproducibly and the number of tests can be increased by parameter variations.

VIL Tests in Everyday Use
The test system supports FAW Hongqi in different development phases. It is suitable whenever testing is required at the level of the complete vehicle. It enables in-depth release tests as well as the final inspection of vehicles and provides significant support during homologation. The VIL test bench therefore makes a significant contribution to efficiently bringing new vehicles with highly developed functions for automated driving onto the market.
Qu Jindai, FAW Group
dSPACE MAGAZINE, PUBLISHED JUNE 2022
About the author:

Qu Jindai
Engineering Department, Electronic and electrical testing technology supervisor, FAW Group, China