Validation of Perception and Sensor Fusion Software Functions and Virtual ECUs with Data Replay Testing

- Test sensor fusion and perception components with recorded real-world data
- Performant, cloud-ready solution with Linux Docker containers
- Flexible integration in a wide variety of frameworks (ROS, ADTF, AUTOSAR, etc.)
- Interoperable system under test (SUT) interfaces for closed-loop and data replay testing
Task
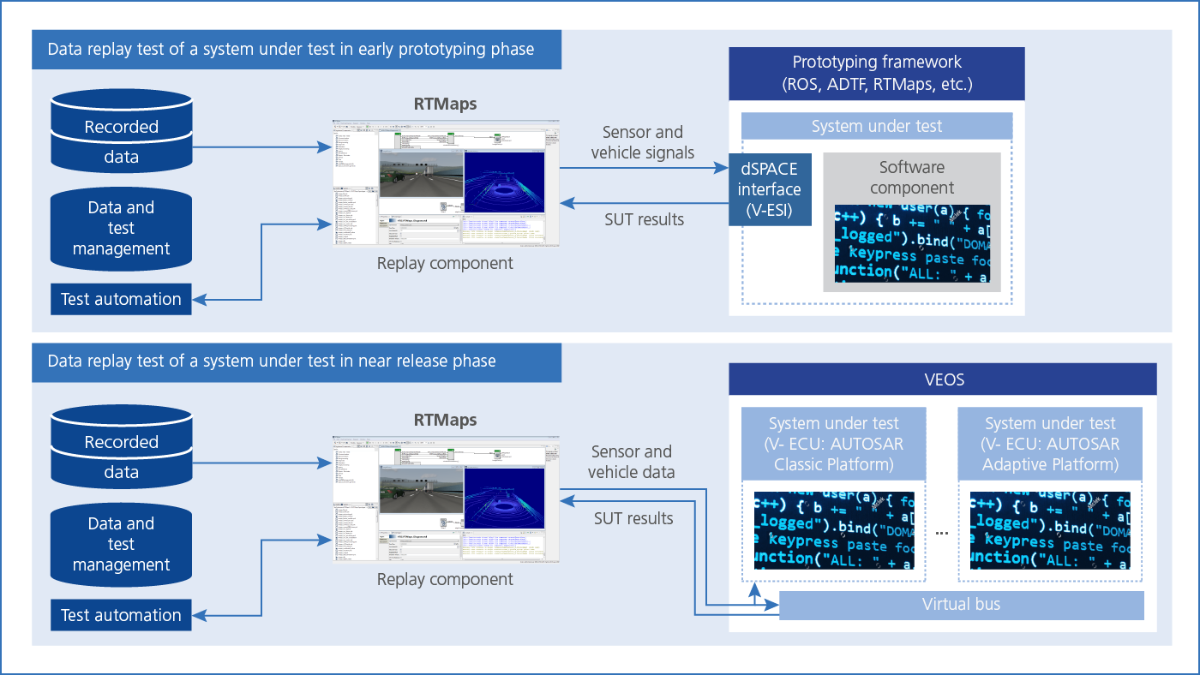
Benchmarking different suppliers, validating functions of perception software, and regression testing are all tasks that have to be done efficiently and on a wide scale across the individual software development phases. Whether in the early software development phase, where multi-sensor development frameworks such as ROS, RTMaps, etc. are used, or in later phases, where a production-ready virtual ECU based on AUTOSAR, etc. is implemented, a deterministic data replay solution is crucial for fault analysis, debugging, and testing of these environment perception and sensor fusion software components.
Challenge
Adaptation of the recorded data to match the interfaces of the system under test (SUT), realistic simulation of the SUT in all its phases with all the corresponding software stack layers, and deterministic data feed to the SUT from heterogenous data sources and data streams are all challenges that a robust data replay software (SIL) solution has to overcome. At the same time, a high modularity, scalability, and efficiency in CPU/GPU resource usage must be ensured.
Solution
The scalability of the test execution and the ability to perform thousands of test instances is a tremendous advantage that can be achieved by using the dSPACE data replay software solutions. All the used components are Linux Docker containerized, enabling high performance and easy scalability in any cloud-based test framework.
RTMaps, the development framework for multisensor applications from Intempora, supports the synchronous replay of recorded data streams within a wide range of file formats, such as MDF4, rosbags, DAT files, etc., in addition to comprehensive 2-D, 3-D visualization capabilities. This is advantageous for debugging and fault analysis.
RTMaps can replay the data in an “as fast as possible” mode to ensure faster than real-time execution without data loss and high performance. VEOS, the integration and simulation platform from dSPACE, supports all relevant standards for the virtual ECU simulation, such as AUTOSAR Adaptive and Classic. Moreover, VEOS supports the realistic simulation of buses such as CAN/CAN FD and Ethernet, which enables high accuracy testing of the whole software stack including the security functions, prior to target deployment.
All the system under test (SUT) interfaces are interoperable for closed-loop and data replay testing. Seamless transition between the data replay software (SIL) solution and hardware (HIL) solution is also ensured as all the interfaces and software components are reusable on the software (VEOS) and hardware (SCALEXIO) platforms.
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.