Lidar Module
Realistic simulation of lidar sensors
Simulation of a lidar front end and sensor environment based on mathematically formulated physical laws. It allows for injecting lidar data in raw or point cloud format into a processing chain.
The Sensor Simulation products based on MotionDesk can no longer be purchased.
Instead, we offer our new generation of visualization and sensor simulation software: AURELION.
For more information on the product life cycle and the dSPACE product life cycle model in general, please refer to our website.
-
SensorSim 1.1
More realistic sensor simulation and higher performance.
-
AI-in-the-Loop
Presenting a new test system for validating an autonomous, AI-based vehicle using realistic sensor simulation.
Read more
-
Sensor Simulation: Key to Autonomous Driving Development
In this webinar recording dSPACE shows the different dSPACE solutions for sensor simulations: starting from ground truth sensor models to raw data stimulation via GPU-based physical sensor models.

Application Area
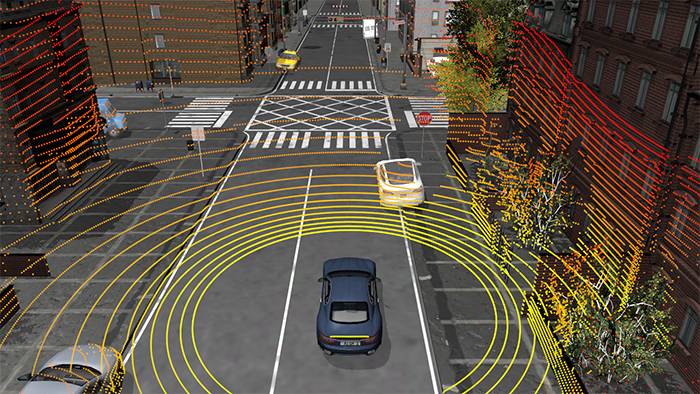
The Lidar Module – an integral part of Sensor Simulation – allows for lidar sensor simulation based on the design principle of the sensor (laser and photodetector). The module provides physics-based simulation of lidar sensors with high variety of configuration options. The environmental simulation is based on raytracing technology. In addition, an API can be used to extend the functionality of the lidar simulation for data processing algorithms and to include custom sensor models. For each point of a point cloud, different values are calculated, e.g., surface normal vector, azimuth angle, elevation angle, distance, reflectivity, relative velocity, material ID and optical power. Additionally, the ray chronology of the scanning sensors can be simulated and is configurable. Multiple echoes (e.g., from the transmission of semi-transparent materials) are also considered.
Components and Characteristics
- Real-time capable raytracing for the computation of the environmental model
- Multiple echoes considered
- Support for flash-based and scanning sensors
- Basic sensor configuration via MotionDesk using a sensor specific GUI
- Positioning and orientation of the sensor
- Field of view
- Sensor specific properties, e.g., configuration for azimuth, elevation, time, and timewise order of simulated rays
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.