dSPACE ADTF Interface Blockset
Developing Driver Assistance Systems with Environment Sensors
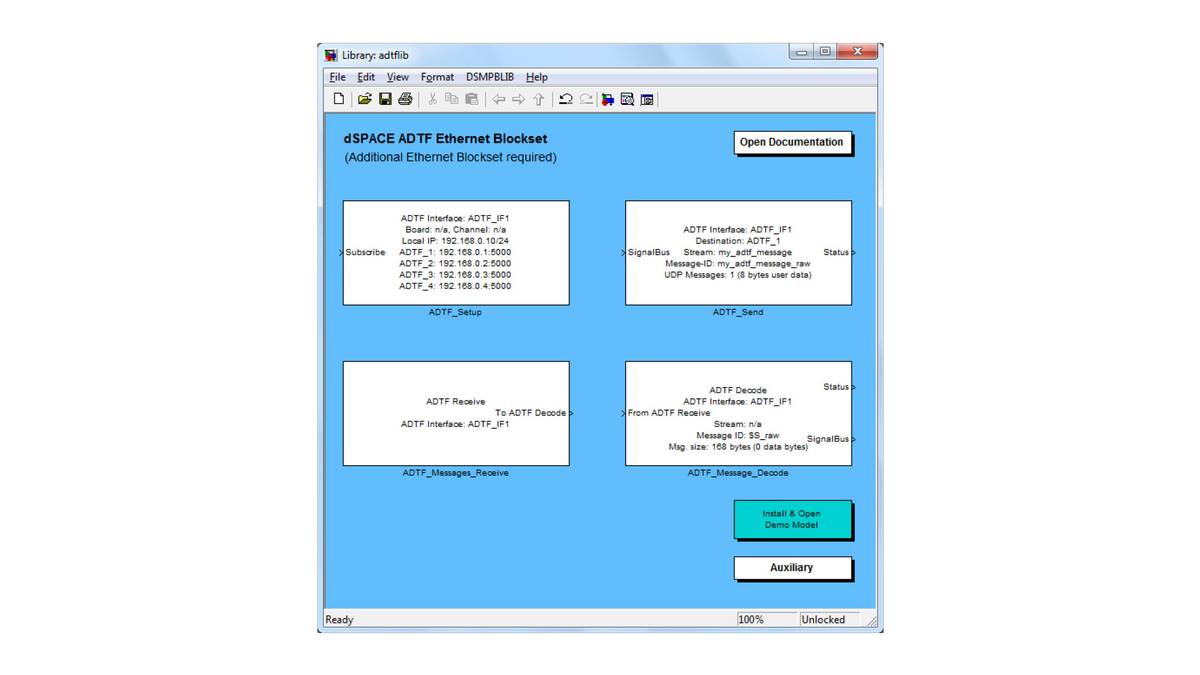
The ADTF Interface Blockset from dSPACE is used to implement bidirectional, low-latency communication between EB Assist ADTF and dSPACE’s PC-based simulation platform VEOS or dSPACE real-time systems via the ADTF Message Bus.
- Interface between dSPACE platforms and EB Assist
- ADTF Bidirectional, low-latency communication via UDP/IP and the ADTF Message Bus
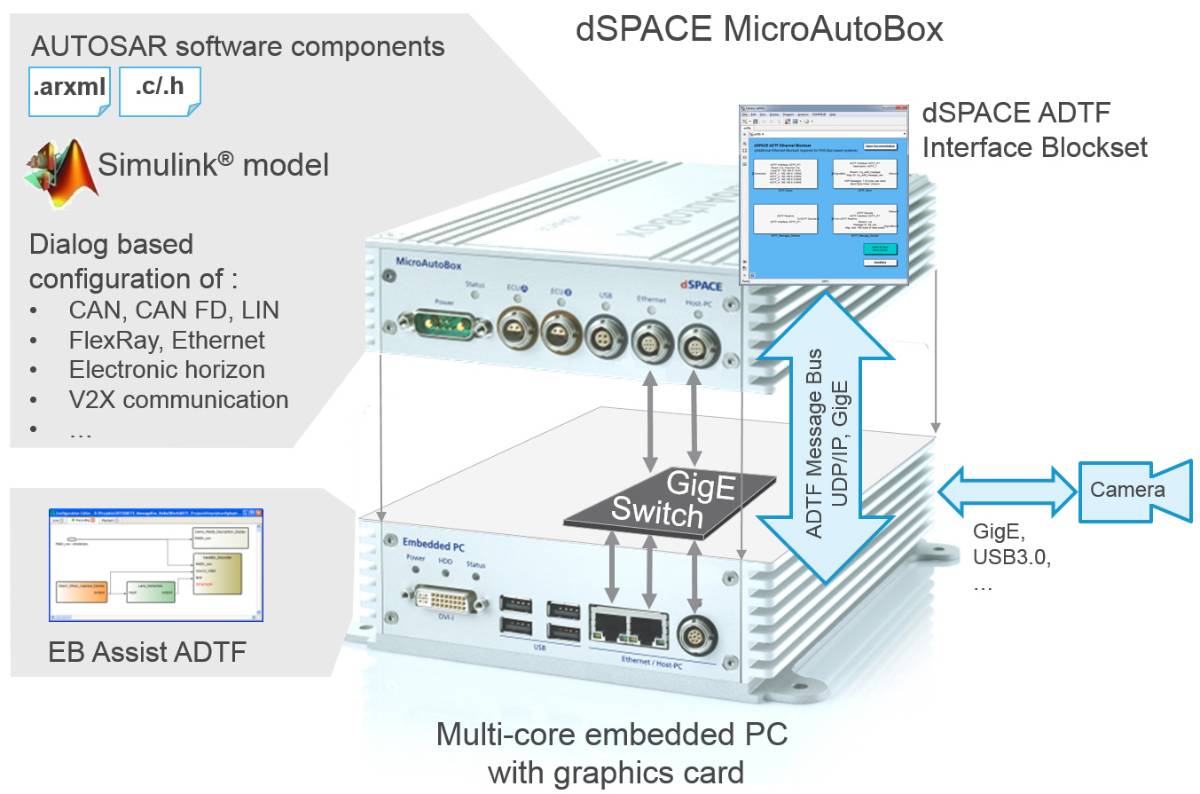
- Easy integration of environment sensors such as cameras


At a Glance
Advanced driver assistance systems (ADAS) and autonomous driving functions require comprehensive data from the vehicle’s environment, which can be captured using video and radar sensors, for example. When prototyping the associated software functions, the data from the various sensors has to be processed and fused before the detected objects are provided to the actual application functions.
Typically, perception functions are implemented using a high-level programming language such as C++, while the development of application functions rests on the model-based design approach using MATLAB®/Simulink®. EB Assist ADTF (Automotive Data and Time-Triggered Framework) is an established tool that can be used for tasks such as developing perception functions. In addition, it provides a convenient way to couple multiple systems via the UDP/IP-based ADTF Message Bus. The ADTF Interface Blockset from dSPACE is used to implement a bidirectional, low-latency communication between dSPACE platforms such as VEOS or dSPACE MicroAutoBox with EB Assist ADTF via the ADTF Message Bus. To use the dSPACE ADTF Interface Blockset, the appropriate hardware and software from dSPACE Release 6.5 or higher is needed for Ethernet connection, plus EB Assist ADTF provided by ElektroBit.
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.