Hy-Nets4all: Comprehensively develop and efficiently validate functions for automated driving for electric vehicles
Caption: The research project funded by the EU and North-Rhine Westphalia will set up a validation environment for optimizing electrified driving with which functions for automated driving for electrified vehicles can be developed comprehensively and efficiently validated.

Launch of a research project funded by the EU and North Rhine-Westphalia
Paderborn, February 27, 2020. dSPACE, DENSO, RWTH Aachen University and the University of Paderborn are continuing their joint research activities in the Hy-Nets4all project. The research project funded by the EU and North-Rhine Westphalia will set up a validation environment for optimizing electrified driving with which functions for automated driving for electrified vehicles can be developed comprehensively and efficiently validated. The aim is to reduce energy requirements, advance the development of electrical components in a targeted manner, and design driving concepts tailored to the charging infrastructure. Another objective is to optimize cooperative driving scenarios and make traffic flow more smoothly.
In the predecessor project called Hy-Nets, which was successfully completed in January 2019, the participating companies and research institutions already demonstrated that energy consumption and, as a result emissions, can be reduced with the help of smart tool chains. Hy-Nets4all will be funded by the European Regional Development Fund (ERDF) for three years. dSPACE is the lead company of the project.
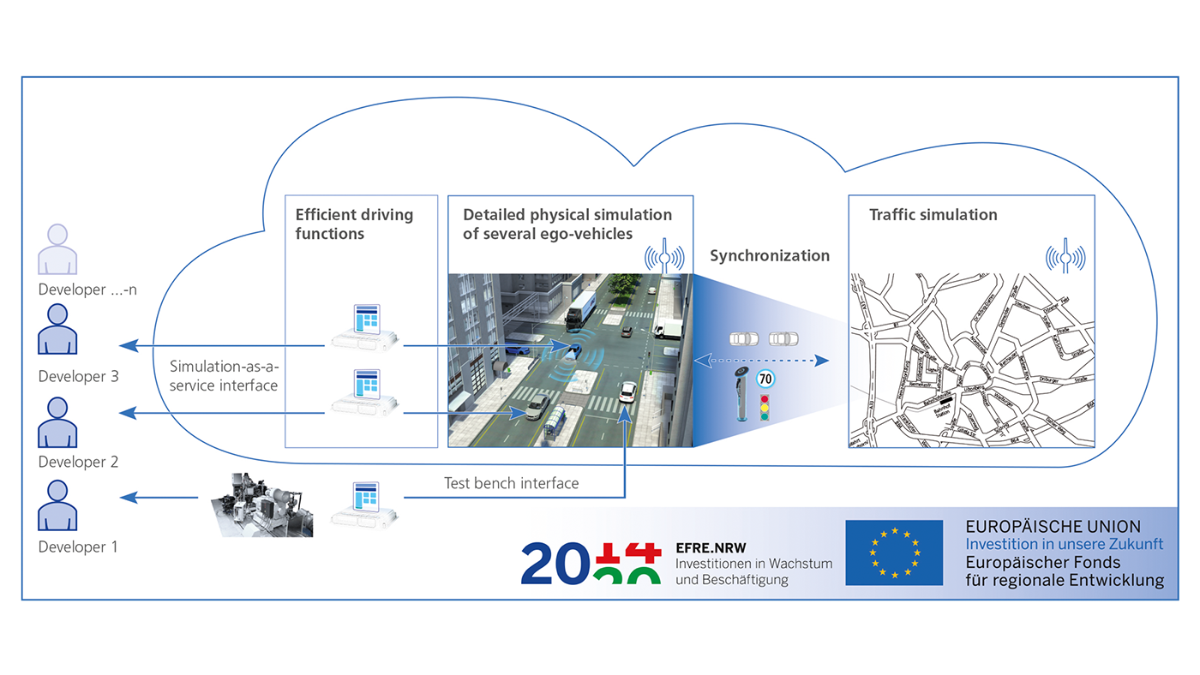
The objective of the Hy-Nets4all approach is the interaction between simulation models and real components as well as their use in the advancement and validation of driving functions. The test drives will be performed in a simulated environment that is the virtual representation of the city of Paderborn. In addition to vehicle-to-everything (V2X) communication, the existing charging infrastructure or a charging infrastructure that will be established in the future must also be taken into account in the simulation.
To be able to investigate the interactions of different vehicles and vehicle types in one environment, several ego-vehicles are simulated in the environment. By integrating real components, such as a combustion engine, electric machine, and power electronics, in the test bench, real emission values and energy consumption are measured.
This approach allows for simulating the interaction with the traffic flow and the effects of functions for cooperative driving in a true in-the-loop approach. Electrical components can be developed and optimized in a resource-efficient manner, and driving functions can be efficiently validated. The new validation platform must be accessible to users, such as car manufacturers and suppliers, via a software-as-a-service (SaaS) interface, enabling them to work across locations and manufacturers. “The tool chain to be developed can massively reduce development and test times for electric vehicles and driving functions. The project contributes further to resource-efficient mobility," says Hagen Haupt, Director Simulation Models & Scenarios at dSPACE.
Drive innovation forward. Always on the pulse of technology development.
Subscribe to our expert knowledge. Learn from our successful project examples. Keep up to date on simulation and validation. Subscribe to/manage dSPACE direct and aerospace & defense now.