Lidarmodul
Realistische Simulation von Lidarsensoren
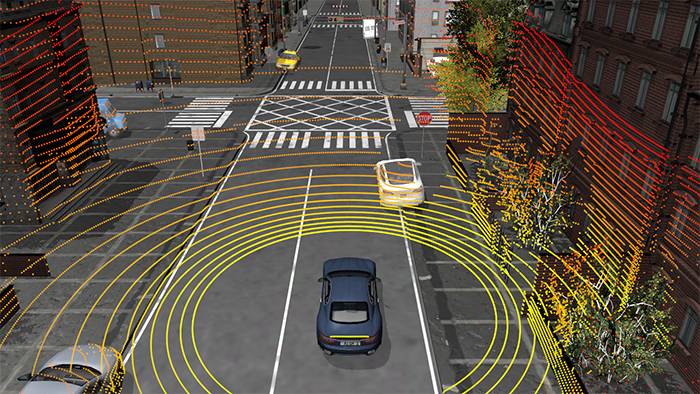
Simulation eines Lidar-Front-ends und der Sensorumgebung basierend auf mathematisch formulierten physikalischen Gesetzen. Es ermöglicht die Einspeisung von Lidardaten im Roh- oder Punktwolkenformat in eine Prozesskette.
The Sensor Simulation products based on MotionDesk can no longer be purchased.
Instead, we offer our new generation of visualization and sensor simulation software: AURELION.
For more information on the product life cycle and the dSPACE product life cycle model in general, please refer to our website.
-
SensorSim 1.1
Realistischere Sensorsimulation und höhere Leistung.
-
AI-in-the-Loop
Neues Testsystem zur Absicherung eines autonomen, KI-basierten Fahrzeugs mittels realistischer Sensorsimulation.
Weitere Informationen
-
Kino für Sensoren
Aktuelle dSPACE Entwicklungen für das autonome Fahren.
-
Objektive Erfassung
Absichern von Funktionen für autonomes Fahren mittels realistischer Sensorsimulation
-
Sensor Simulation: Der Schlüssel in der Funktionsentwicklung für autonomes Fahren
In dieser Webinar-Aufzeichnung zeigt dSPACE die verschiedenen dSPACE Lösungen für die Sensorsimulation – angefangen bei Ground-Truth-Sensormodellen bis hin zur Rohdatensimulation mit GPU-basierten physikalischen Sensormodellen.

Anwendungsbereich
Das Lidarmodul – ein integraler Bestandteil der Sensorsimulation – ermöglicht die Lidarsensorsimulation nach dem Konstruktionsprinzip des Sensors (Laser und Photodetektor). Das Modul bietet eine physikalisch basierte Simulation von Lidarsensoren mit einer Vielzahl von Konfigurationsmöglichkeiten. Die Umgebungssimulation basiert auf der Raytracing-Technologie. Darüber hinaus können die Funktionalität der Lidarsimulation für Datenverarbeitungsalgorithmen über eine API erweitert und kundenspezifische Sensormodelle inkludiert werden. Für jeden Punkt einer Punktwolke werden unterschiedliche Werte berechnet, zum Beispiel Oberflächennormalvektor, Azimutwinkel, Elevationswinkel, Abstand, Reflexionsvermögen, Relativgeschwindigkeit, Material-ID und optische Leistung. Zusätzlich kann die Strahlchronologie der Abtastsensoren simuliert und konfiguriert werden. Mehrfachechos, zum Beispiel aus der Übertragung von semitransparenten Materialien, werden ebenfalls berücksichtigt.
Komponenten und Eigenschaften
- Echtzeitfähiges Raytracing zur Berechnung des Umgebungsmodells
- Mehrfachechos berücksichtigt
- Unterstützung von flashbasierten und scannenden Sensoren
- Basis-Sensorkonfiguration über MotionDesk mit einer sensorspezifischen GUI
- Positionierung und Ausrichtung des Sensors
- Blickwinkel
- Sensorspezifische Eigenschaften, zum Beispiel Konfiguration für Azimut, Höhe, Zeit und zeitliche Reihenfolge der simulierten Strahlen
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.