RTI Electric Motor Control Blockset
Konfigurieren der MicroLabBox-I/O-Funktionen für die Elektromotorsteuerung
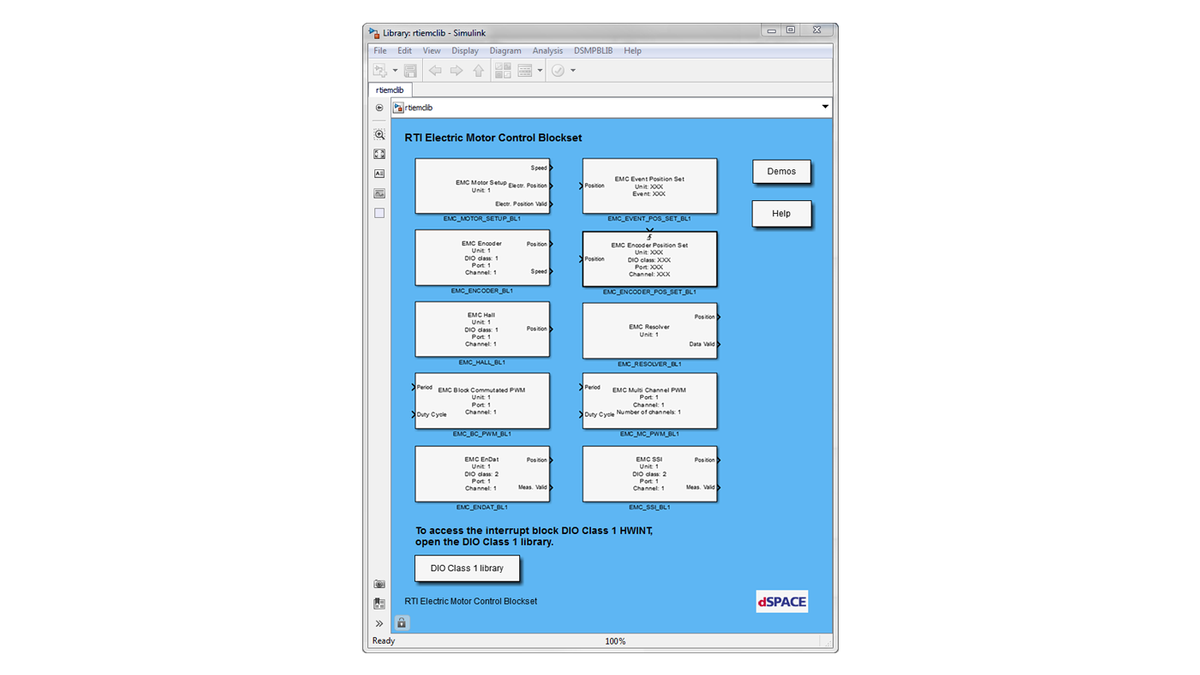
Mit dem RTI Electric Motor Control Blockset, einer Erweiterung von Real-Time Interface (RTI), sind der Zugriff auf die I/O-Funktionen der MicroLabBox zur Steuerung von Elektromotoren sowie deren komfortable Konfiguration möglich.
- Zugriff auf die MicroLabBox-I/O-Funktionen der Elektromotorsteuerung
- Einfache Konfiguration und Implementierung von Hall-Sensoreingängen, Inkrementalgebern, Resolvern, EnDat- und SSI-Schnittstellen sowie PWM-Signalgenerierung
- Automatische Berechnung und Interpolation von Motordrehzahl, Position und Winkel sowie Generierung von asynchronen Ereignissen

Anwendungsbereiche
Die Steuerung von Elektromotoren spielt eine wichtige Rolle in zahlreichen Anwendungsbereichen, darunter Automobilindustrie, Robotik und Medizintechnik. Sie hilft, neue, strenge Schadstoffregularien einzuhalten sowie präzisere Maschinen im industriellen Umfeld aufzubauen. Oftmals ist der Regelalgorithmus eines Elektromotors der entscheidende Faktor bei der Erfüllung von Kundenanforderungen. Allerdings ist der Aufwand für die Entwicklung, die Implementierung und die Absicherung der erforderlichen Regelalgorithmen in herkömmlichen, meist unflexiblen Werkzeugketten oftmals sehr hoch. Die MicroLabBox ist zusammen mit dem RTI Electric Motor Control Blockset das ideale System, um diesen Aufwand zu reduzieren. Das Entwickeln und Testen neuer Regelalgorithmen findet in einer modellbasierten Software-Umgebung mit minimalem Zeitaufwand statt. Das RTI Electric Motor Control Blockset ist eine benutzerfreundliche Software-Schnittstelle und verbindet die Echtzeit-Hardware-Plattform MicroLabBox mit der modellbasierten Entwicklungssoftware MATLAB®/Simulink®/Stateflow® von MathWorks.
Vorteile
Das RTI Electric Motor Control Blockset ermöglicht den Zugriff auf die I/O-Funktionen der MicroLabBox zur Steuerung von Elektromotoren sowie deren komfortable und intuitive Konfiguration. Es ist kein zusätzlicher Modellierungsaufwand erforderlich, um die für Elektromotoranwendungen üblichen Sensorschnittstellen wie Hall, Inkrementalgeber, Resolver, EnDat oder SSI zu verwenden. Zudem sind einsatzfertige Simulink-Blöcke zum Generieren unterschiedlicher synchroner PWM-Signale verfügbar. Die Ist-Werte von Drehzahl, Position und Winkel des Elektromotors werden automatisch berechnet. Werden Sensorschnittstellen mit geringer Auflösung wie Hall-Sensoren eingesetzt, sorgt die automatische Interpolation für eine höhere Sensorauflösung und verbessert so die Qualität der Positionsmessung. Um die Ist-Motorposition schon beim ersten Start zu erfassen, steht die Hall-Sensor-Schnittstelle direkt zur Verfügung. Nach einer Umdrehung des Elektromotors ist es möglich, auf einen Sensor mit höherer Auflösung wie die Encoder-Schnittstelle zu wechseln. Durch dieses Vorgehen ist für den Regler immer eine zulässige Position des Motors und die optimale Auflösung zugänglich. Simulink-basierte Reglermodelle können leicht mit den erforderlichen I/O-Schnittstellen verbunden und per Knopfdruck auf die MicroLabBox heruntergeladen werden. Der Regler kann in einer realen Umgebung mit unterschiedlichen Sensoren und Aktoren getestet werden und neue Strategien für die Motorsteuerung lassen sich deutlich schneller entwickeln als mit herkömmlichen Werkzeugketten.
| Functionality | Description |
|---|---|
|
General |
|
- Vertrieb Unsere Mitarbeiter im technischen Vertrieb beraten Sie bei der Auswahl Ihres dSPACE Systems. Auch für Preisauskünfte oder Informationen zu weiteren dSPACE Produkten stehen sie Ihnen gerne zur Verfügung.
- Beziehen von dSPACE Software Informationen zum Herunterladen, Installieren und Lizenzieren von dSPACE Software
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.