SCALEXIO EMH Solution für die Simulation elektrischer Antriebe
Prozessorbasierte Simulation von elektrischen Antrieben
Die SCALEXIO EMH Solution bietet eine umfassende ConfigurationDesk-I/O-Bibliothek für die prozessorbasierte HIL-Simulation elektrischer Antriebe.
- Prozessorbasierte Simulation
- Vordefinierte Funktionsblöcke
- Ideal für PWM- und PSS-Anwendungen
Die SCALEXIO EMH Solution ermöglicht die einfache prozessorbasierte Simulation elektrischer Antriebe.


Prozessorbasierte Simulation von elektrischen Antrieben
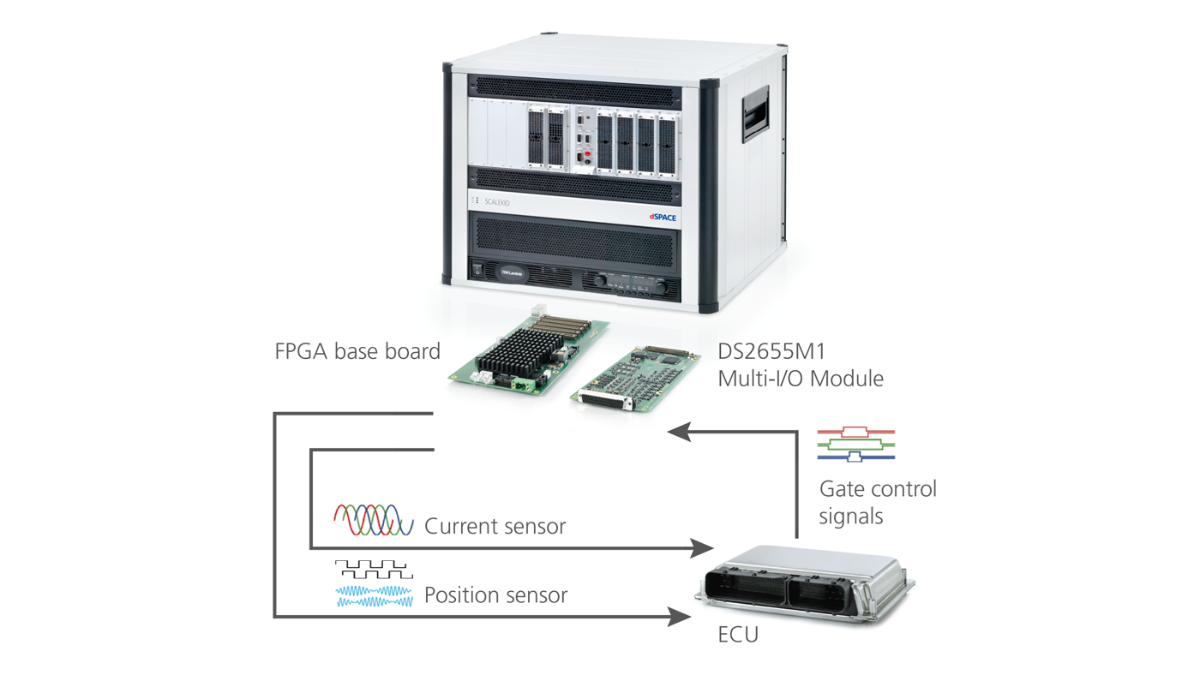
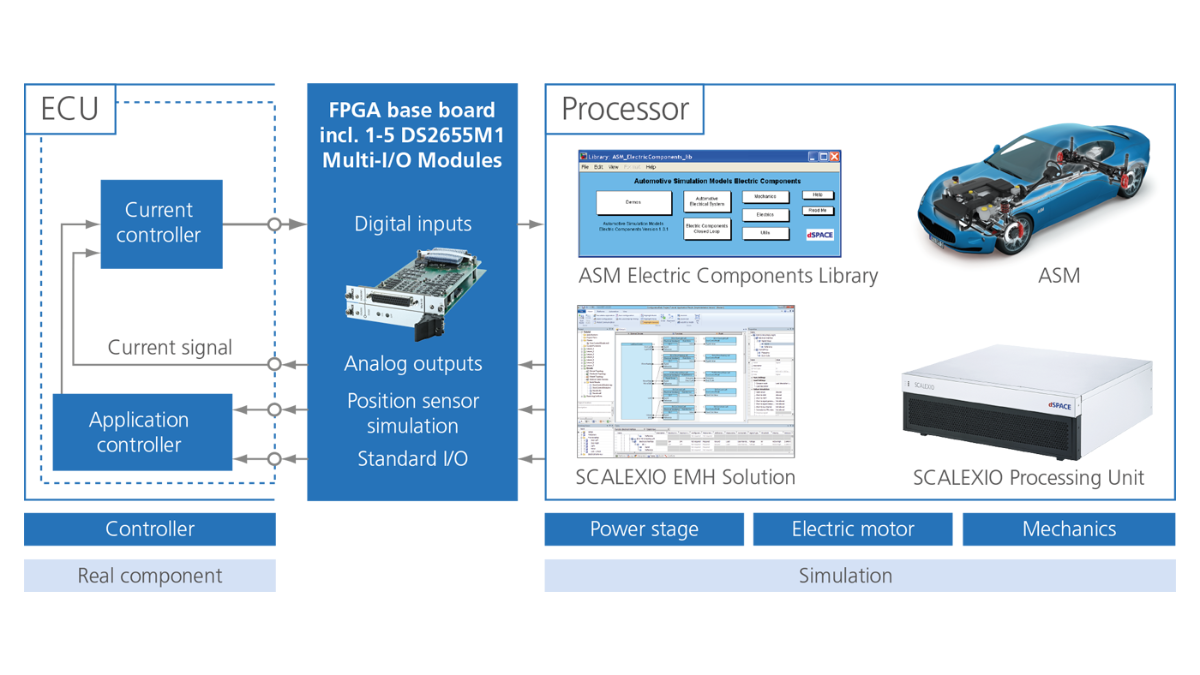
Die SCALEXIO EMH Solution wird eingesetzt, um die I/O-Funktionen für die Simulation von bis zu zwei elektrischen Antrieben zu konfigurieren. Das erforderliche FPGA Base Board (DS6601, DS6602 oder DS2655) wird mit ConfigurationDesk konfiguriert. Mit den vordefinierten Funktionsblöcken müssen Anwender keinen FPGA-Code programmieren oder generieren. Das DS2655M1 und das DS6651 Multi-I/O Module sowie die integrierten Angular Processing Units (APUs) ermöglichen die Verwendung von hochauflösender I/O, um Anwendungen im Bereich der Positionssensorsimulation (PSS) und Pulsweitenmodulation (PWM) zu unterstützen. Durch das variable I/O-Kanal-Mapping und die flexible Unterstützung von bis zu fünf DS2655M1 oder bis zu fünf DS6651 Multi-I/O Modules entfaltet sich das volle Anwendungsspektrum der Hardware. Wenn der Antriebsregler eine erweiterte Simulationsauflösung benötigt, kann nahtlos zur FPGA-basierten Simulation gewechselt werden, ohne dass Änderungen an der Hardware notwendig sind. Das EMH Solution FPGA verfügt über vier interne APUs, die auf dem FPGA Base Board ausgeführt werden und die lokale Position berechnen. Des Weiteren lassen sich bis zu sechs Master-APUs über IOCNET global als Positionsquellen referenzieren. Jeder der Positionssensoren kann konfiguriert werden, um eine der zehn APUs als Positionsquelle zu bestimmen.
Je nach Anzahl der DS2655M1 Multi-I/O Modules variiert auch die Anzahl der I/O-Kanäle.
Hauptfunktionen für Positionssensorsimulation (PSS)
| Function | Description | I/O Requirements per Function | |
|---|---|---|---|
| Resolver Out | Simulation with configurable pole pair number, offset angle, transformer ratio. Excitation input signal delay. Output amplitude and phase error manipulation. | 2 |
Excitation: 1x Analog In Sin/Cos: 2x Analog Out |
| Sine Encoder Out | Simulation with configurable number of lines, output amplitude and DC offset | 2 | A,B, Index: 3x Analog Out Or 1 6x Analog Out |
| Incremental Encoder Out | Simulation with configurable number of lines and offset angle | 2 | A,B, Index: 3x Digital (Out) Or 1 6x Digital (Out) |
| Hall Encoder Out | Simulation with configurable pole pair number, offset angle, angle-dependent pulse activation/deactivation | 2 | A,B,C: 3x Digital (Out) Or 1 6x Digital (Out) |
| Analog Wavetable Encoder Out | Output with freely designable analog shape format for 360 degrees with up to 16383 values and optional linear interpolation for intermediate values. Configurable number of waveforms per revolution. | 3 | 1x Analog Out |
|
Digital Wavetable Encoder Out |
Output with freely designable digital shape format for 360 degrees with up to 16383 values. Configurable number of waveforms per revolution. | 3 | 1x Digital (Out) |
Hauptfunktionen für Pulsweitenmodulation (PWM)
| Function | Description | I/O Requirements per Function | |
|---|---|---|---|
| Six-Channel PWM In | Supporting duty cycle, period time, latch time and dead time2 measurement and configurable interrupt generation (latch-based measurement), oversampling, downsampling Optional external triggering Optional2 dead time violation interrupt generation | 2 |
Gates: 3x Digital (In) Or 2 Optional ext. trigger: Optional latch pulse: 1x Digital (Out) |
| Single-Channel PWM In | Combined edge-based and latch-based measurement of duty cycle and frequency | 4 | 1x Digital (In) |
| Single-Channel PWM Out | PWM generation with variable frequency and duty cycle | 4 | 1x Digital (Out) |
I/O-Grundfunktionen
| Function | Description | Number of Functions per FPGA Base Board | I/O Requirements per Function |
|---|---|---|---|
| Multi-Bit In | Standard digital input functionality for variable number of channels | 4 | 1-50 Digital (In) |
| Multi-Bit Out | Standard digital output functionality for variable number of channels | 4 | 1-50 Digital (Out) |
| Multi-Voltage In | Standard analog input functionality for variable number of channels | 4 | 1-25 Analog In |
| Multi-Voltage Out | Standard analog output functionality for variable number of channels | 4 | 1-25 Analog Out |
-
- Online-Ansicht
- Download
- SCALEXIO Modulares Echtzeitsystem für RCP- und HIL-Anwendungen
- ASM Electric Components Echtzeitmodelle für die Simulation von elektrischen Fahrzeugsystemen und -antrieben
- Electrical Power Systems Simulation Package Einfache Echtzeitsimulation von leistungselektronischen Schaltungen, die mit Simscape Electrical™ (Specialized Power Systems) entwickelt wurden
- Vertrieb Unsere Mitarbeiter im technischen Vertrieb beraten Sie bei der Auswahl Ihres dSPACE Systems. Auch für Preisauskünfte oder Informationen zu weiteren dSPACE Produkten stehen sie Ihnen gerne zur Verfügung.
- Beziehen von dSPACE Software Informationen zum Herunterladen, Installieren und Lizenzieren von dSPACE Software
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.