Simulationsmodell für Ultraschallsensoren
|
Veröffentlicht:
15.09.2020 |
Motivation
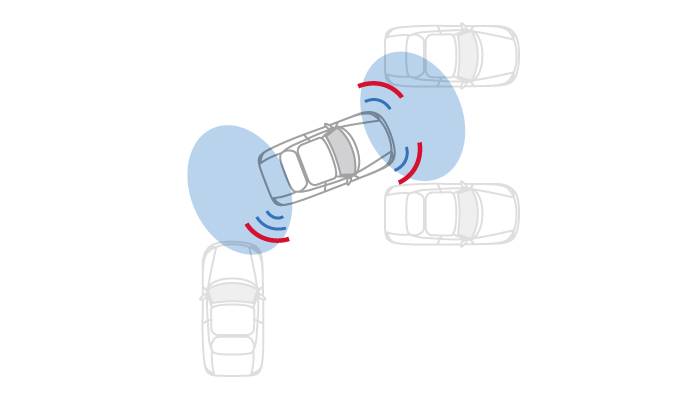
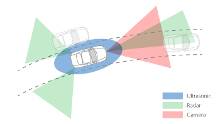
Ultraschallsensoren werden seit Anfang der 2000er Jahre in herkömmlichen Autos als Mittel zur Rückmeldung des Hindernisabstands für den Fahrer eingesetzt. Die Entwicklung in diesem Bereich hat sich fortgesetzt, und heute sind diese Sensoren auch die wichtigsten Feedback-Komponenten bei automatisierten Parkmanövern. Der Test von Ultraschallsensoren wird durch ihre Variationen in Anzahl, Einbaulage, physikalischer Form, Lackfarbe und Ultraschalleigenschaften erschwert. Da die Ultraschallsensoren jedoch eine wichtige Rolle bei der Informationsbeschaffung für die Sensorfusion der Nahfeldüberwachung und für das Erreichen der autonomen Fahrstufen 3, 4 und 5 spielen, ist es keine Option, sie nicht gründlich zu testen.
dSPACE entwickelte ein Testsystem, das Ultrasonic Sensor Test System (Lab), um die Ultraschallsensoren „over the Air“ anzuregen. Das System benötigt während der Laufzeit keine beweglichen Teile. Es handelt sich um Device-under-Test-(DUT)-Diagnose und kann mit dem virtuellen dSPACE ASM Ultrasonic Sensor Model gekoppelt werden, das Strahlen-Daten zur Erkennung von Hindernissen in einer virtuellen Umgebung verwendet.
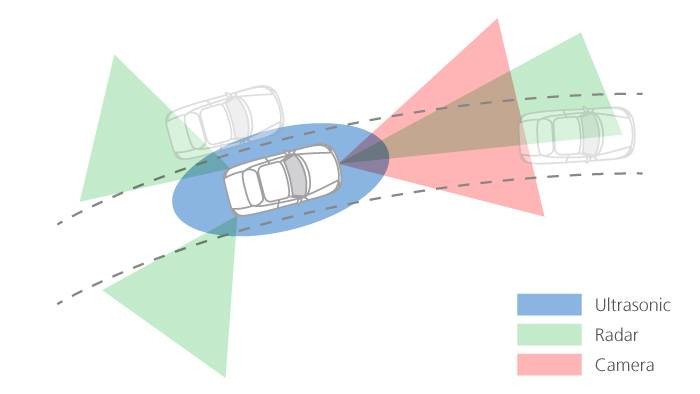
Das System kann auch in Verbindung mit anderen dSPACE Simulationsoptionen wie Kamera und Radar eingesetzt werden.

Systemübersicht
Das Ultrasonic Sensor Test System (Lab) besteht typischerweise aus einer echtzeitfähigen SCALEXIO Processing Unit, auf der die Module ASM Vehicle Dynamics und Traffic für Fahrzeugdynamik und Verkehr ausgeführt werden, einer Hochleistungs-FPGA-Karte, die die Low-Level-Verarbeitung des dSPACE Wandlers durchführt, und einem Kommunikationsnetzwerk, das den Steuergeräte-Ausgang liest.
Es gibt keine Erfassung oder Manipulation zwischen dem DUT-Sensor und dem Steuergerät, was bedeutet, dass das Kommunikationsprotokoll nicht offengelegt werden muss und das DUT-System als Black Box betrachtet wird.
Wenn der DUT-Sensor ein Ultraschallpulspaket abschickt, um eine Abstandsmessung durchzuführen, wird das Paket erfasst und vom dSPACE Transceiver verarbeitet. Nach einer Zeitverzögerung, die proportional zum Abstand ist, schickt der dSPACE Transceiver einen Ultraschallimpuls zurück an den DUT-Sensor.
Ultrasonic Sensor Test System (Lab)
Das Testsystem wird als Stand-alone-Version oder integriert in ein kundenspezifisches SCALEXIO Rack-System angeboten. Bestehende dSPACE Hardware-in-the-Loop-Simulator-Racks können mit dem Mobile Ultrasonic Sensor Test System erweitert werden.
Für den Fall, dass Sie das Steuergerät außerhalb des Rack-Gehäuses verwenden möchten, sind das Steuergerät und seine Sensoren von der rack-internen Signalverdrahtung getrennt. In diesem Fall wird die ECU-seitige Verkabelung nur durchgeschleift und nicht abgegriffen. An der Vorderseite des Systems sind BNC-Anschlüsse für den komfortablen Zugriff vorgesehen.
Selbst bei einer kompakten Größe von nur 555 x 560 x 340 mm unterstützt das dSPACE System bis zu 12 Sensoren.
Der dSPACE Sensor und die Signalgeneratoren sind mit den realen Parksensoren über die Luft verbunden, mit Sensorklemmen befestigt und von externen Störungen isoliert. Das dSPACE Echtzeitsystem ist vom Ultrasonic Sensor Test System (Lab) getrennt.
The dSPACE sensor and signal generators are connected to the real parking sensors over the air, attached with sensor clamps, and isolated from external interferences. The dSPACE real-time system is separate from the Ultrasonic Sensor Test System (Lab).
Software-Übersicht
Die Software-Implementierung auf dem dSPACE Echtzeitsystem besteht aus zwei Teilen: SCALEXIO Processing Unit und FPGA-Anwendung.
- Die SCALEXIO Processing Unit führt das ASM Ultrasonic Sensor Model, das ASM Traffic Model und die Schnittstellenblöcke zu und von der FPGA-Anwendung aus.
- Die FPGA-Anwendung enthält die Low-Level-Logik und ist die Schnittstelle zur I/O. Informationen zum Messplan und den Messmodi sind nicht erforderlich.
Die Schnittstelle zwischen der Processing Unit und den FPGA-Boards dient hauptsächlich zur Parametrierung der FPGA-Anwendung und zur Überwachung der FPGA-Low-Level-Signale sowie der berechneten Eigenschaften wie der Frequenz .
Features des ASM Ultrasonic Sensor Models
Das ASM Ultrasonic Sensor Model bietet eine realistische Echoberechnung, die in der Over-the-Air-Simulation verwendet wird. Dasselbe Modell kann für das Testen und Entwickeln von Algorithmen in einer Software-in-the-Loop-Simulation verwendet werden, was unseren Kunden einen nahtlosen Übergang zwischen verschiedenen Entwicklungsphasen ermöglicht. Das Modell wurde für hochoptimierte Berechnungen entwickelt und läuft auf der Verarbeitungseinheit des SCALEXIO-Systems ohne den Einsatz zusätzlicher GPUs.
Das Sensormodell bietet eine Reihe von Features, um dem realen Verhalten so nahe wie möglich zu kommen. Dazu gehören:
Realistische und einfache Objekt-Parametrierung
Das ASM Ultrasonic Sensor Model verwendet ein realistisches und einfach zu verwendendes Objektparametrierungsmodell. Objekte werden durch Konturlinien und ihre Höhe definiert, was zu extrudierten Konturlinien führt. Die Objekte haben sechs Freiheitsgrade und können für jeden Anwendungsfall eingesetzt werden.
Direkte und indirekte (Kreuz-)Echos
Bei Direktechos wird für das Senden und Empfangen derselbe Sensor verwendet. Bei indirekten Echos (oft als Kreuzechos bezeichnet) unterscheiden sich Sender und Empfänger des Echos. Indirekte Echos liefern der ECU zusätzliche Informationen und sind daher häufig für gültige Erkennungen erforderlich. Das ASM Ultrasonic Sensor Model berechnet die direkten und indirekten Echos für jeden Sensor.
Mehrere Echos pro ECU-Messung
Moderne Ultraschallsensoren können mehrere Echos von einem oder mehreren Objekten erkennen und verarbeiten. Das ASM Ultrasonic Sensor Model bietet mehrere realistische Echos pro Objekt und über mehrere Objekte hinweg für jeden Sendezyklus.
Freiheitsgrade der Ultraschallsensor-FPGA-Anwendung
Das dSPACE System nutzt vier Freiheitsgrade in der FPGA-Anwendung, um realistische Echos zu erzeugen:
- Time of flight (ToF)
Die Ultraschall-Entfernungsmessungen basieren auf der Wellenlaufzeit. Die Zeit, die die Welle benötigt, um vor und wieder zurück zu laufen, ist proportional zur Entfernung. Umweltbedingungen, insbesondere die Temperatur, beeinflussen die Wellengeschwindigkeit in der Luft und können für die Abstandsberechnung im dynamischen Modell (Simulation) oder mittels einer Temperaturkammer (physikalisch) berücksichtigt werden. - Amplitude
Je nach Hindernisposition, -winkel und -charakteristik prallt ein Teil der Messenergie zurück und ein Teil wird entweder absorbiert oder prallt in eine andere Richtung ab. Die Möglichkeit, die Amplitude des erzeugten Echos zu manipulieren, sorgt für ein realistisches Verhalten. - Frequenz
Die FPGA-Anwendung unterstützt feste und modulierte Frequenzen im typischen Automobilbereich. - Impulszahl
Die Impulszahl der übertragenen Messwelle kann variieren und diese Eigenschaft ist entsprechend in der FPGA-Anwendung verfügbar.
Frequenz und Impulszahlen stehen möglicherweise nicht für eine direkte Manipulation während der Laufzeit zur Verfügung.
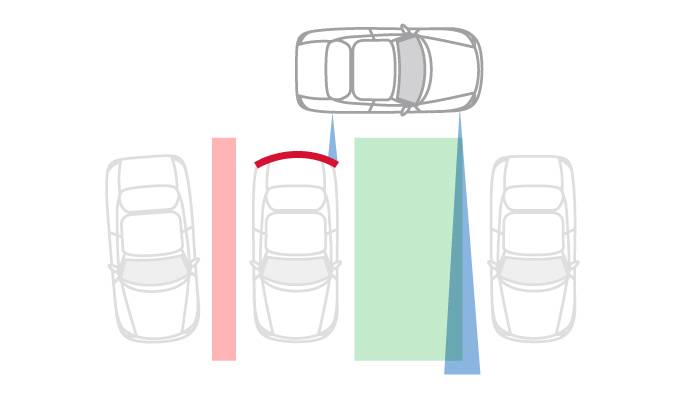
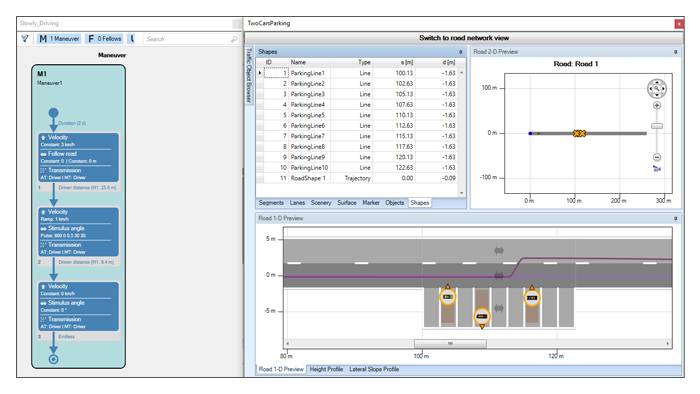
Anwendungsbeispiel: Parking Space Measurement (PSM)
Eine der vielen Anwendungen des Ultrasonic Sensor Test Systems (Lab) und des ASM-Ultrasonic-Sensor-Model-Systems ist die Validierung von Parkraum-Messsystemen (PSM). Diese Systeme messen die Breite einer Längs- oder Querparklücke und leiten ein Parkmanöver ein. Ein solches Szenario kann mit dSPACE ModelDesk parametriert und mit dSPACE MotionDesk und dSPACE ControlDesk in Echtzeit visualisiert werden. Das Ultrasonic Sensor Test System (Lab) empfängt die berechneten Echos vom Modell und stimuliert die Ultraschallsensoren des DUT.



Wenn eine Abstandsmessung vom DUT ausgelöst wird, analysiert der dSPACE Sensor die Wellenform auf Merkmale wie Frequenz und Amplitude. Gleichzeitig startet ein Timer, und wenn die Laufzeit, die proportional zu dem vom ASM Ultrasonic Sensor Model berechneten Echoabstand ist, erreicht wird, löst der dSPACE Signalgenerator ein Echosignal mit genau passenden Eigenschaften aus.
Vorteile
Die Kombination des dSPACE Ultrasonic Sensor Test Systems (Lab) und des ASM Ultrasonic Sensor Models ermöglicht die präzise und reproduzierbare Simulation und den Test einer unbegrenzten Anzahl von Szenarien „over the Air“. Die Integration des ASM Ultrasonic Sensor Models in die dSPACE Werkzeugkette ermöglicht eine einfache und intuitive Parametrierung von Szenarien und eine anschauliche Visualisierung in MotionDesk. Das Ultrasonic Sensor Test System (Lab) bietet eine Lösung zum Testen einer echten Einpark-ECU und Ultraschall-Sensoren ohne Leitungsabgriff oder bewegliche Teile während der Laufzeit und lässt sich leicht in bestehende Systeme integrieren. Das Testsystem wird in einer kompakten Größe angeboten, entweder als Stand-alone-Version oder als Teil eines Full-Size-Systems. Das System kann um weitere dSPACE Sensorsimulationsoptionen für die Fusion bei ADAS/AD-Aufgaben, zum Beispiel Kamera, Lidar und Radar, erweitert werden.
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.