Unsere Vision der Zukunft ist klar: Autos sollen ihren Weg zum Ziel autonom, also ohne einen Fahrer zurücklegen können. Bereits die ersten Schritte hin zu einer Autonomie stellen dabei Herausforderungen dar: Fahrzeuge sind zwar heutzutage bereits teilweise autonom unterwegs, allerdings nur in sehr eingeschränkten Situationen.
Die anspruchsvollen Funktionen eines (teil-)autonomen Systems, z. B. eines Autobahnpiloten, sind nicht nur schwierig zu entwickeln, sondern das System muss auch jederzeit und unter allen Umständen ein sicheres Verhalten über die beabsichtigte Funktion hinaus gewährleisten. Im realen Verkehr müssen die Fahrzeuge unzählige Situationen bewältigen, die durch Tests validiert werden müssen. Nicht alle Tests können im Straßenverkehr durchgeführt werden. Selbst Simulationslösungen, die direkt mit dem Steuergerät in Echtzeit arbeiten, sind derzeit mit der schieren Menge an Daten überfordert.
Die Lösung
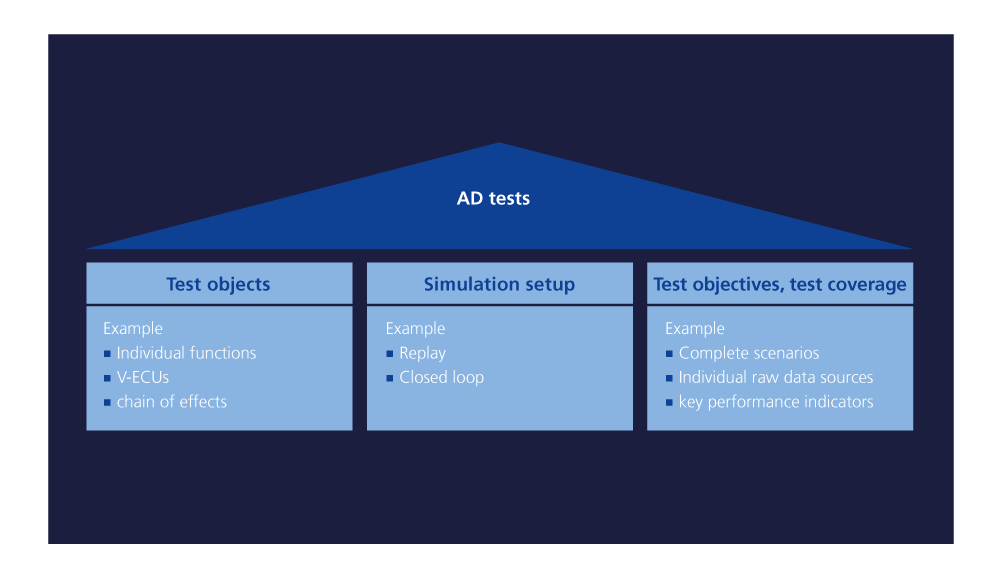
Unsere Strategie zur Überwindung dieses Problems stützt sich auf drei Säulen: die Testobjekte, die Simulationsstruktur und die Testziele.
Testobjekte und Testverteilung
Es muss zentrale, kritische Tests geben, die direkt mit dem zu testenden Steuergerät und den Steuergeräteverbunden oder auf der Straße durchgeführt werden. Um die erforderliche Anzahl von Tests durchführen zu können, muss ein wesentlicher Teil der Tests auf Software-in-the-Loop (SIL)-Systemen durchgeführt werden, was ein virtualisiertes Testobjekt erfordert. Die Lösung konzentriert sich auf das zu testende Objekt (SUT), d. h. den eigentlichen Code der zu testenden Funktionen. Für die Bereitstellung des virtuellen Testobjekts gibt es mehrere technische Ansätze: So lässt sich beispielsweise der Code über entsprechende Schnittstellen als vollständige und lauffähige Einheit in das Simulationssystem integrieren. dSPACE arbeitet daran, diese Art der Integration mit Hilfe der Container-Technologie zu realisieren. Sie können auch Seriencode integrieren, insbesondere als virtuelle Steuergeräte (V-ECUs). dSPACE SystemDesk bietet alle Vorteile der Seriencode-Integration, von der Busanbindung bis zur Betriebssystemkonfiguration. Um festzulegen, wie das Testobjekt virtualisiert werden soll, muss der Testumfang genau definiert werden. Wollen Sie einzelne Funktionen, die komplette Steuergeräte-Software oder eine bestimmte komplette Wirkungskette testen? Diese Faktoren bestimmen letztendlich das Design des SUT.
Die Entwicklung von Szenariodatenbanken, die Herkunft der Szenarien und ihre Relevanz für die Erreichung der Testziele sind Fragen, die sich derzeit fast alle unsere Kunden stellen.

Der Simulationsaufbau
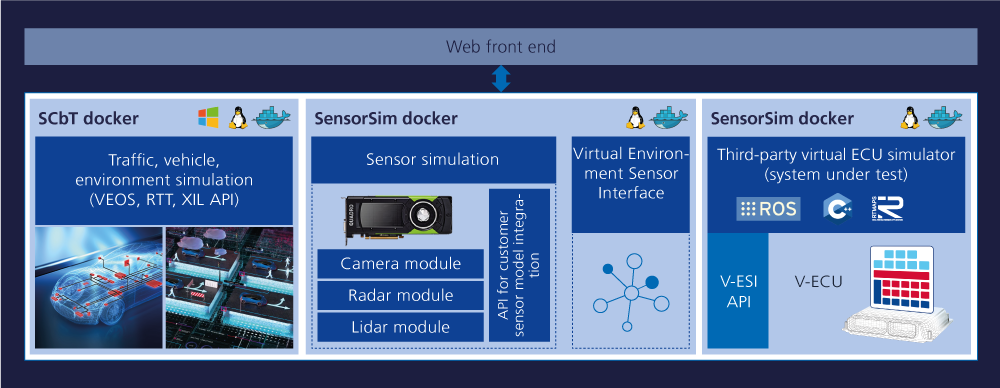
Die zweite Säule ist der Simulationsaufbau und umfasst sowohl das Simulationssystem als auch dessen Infrastruktur. Der Einsatz der SIL-Technologie macht die Simulation unabhängig von Echtzeit und spezieller Hardware. Mit VEOS bietet dSPACE eine PC-basierte Simulations- und Integrationsplattform, die als Basis für SIL-Tests dienen kann. Diese Vielseitigkeit ist aus zwei Gründen besonders wichtig: Erstens kann die Umgebung mit beliebigem Detailgrad simuliert werden. Dazu gehören neben Motor- oder Batteriemodellen insbesondere auch Sensormodelle, die von Objektlisten bis hin zu sensorrealistischen Daten alle relevanten Detailstufen simulieren. Zweitens soll der Testaufbau leicht vervielfacht werden, um einen hohen Testdurchsatz zu erreichen. Cloud-Systeme, sowohl öffentliche als auch kundeneigene Rechenzentren, nutzen Container- und Orchestrierungstechnologien, um eine Plattform für die mehrfache parallele Instanziierung bereitzustellen. dSPACE arbeitet daran, seine Werkzeuge nahtlos in Cloud-Systeme zu integrieren, indem es vorkonfigurierte Container bereitstellt, die beispielsweise eine VEOS-Installation enthalten.
Die Testziele
Dies führt zu einem drastisch steigenden Bedarf an Tests. Letztlich wird die Validierung auf der Durchführung einer Reihe spezifischer Verkehrsszenarien während der Simulation beruhen. Dazu gehört auch die Simulation und Variation von synthetischen Szenarien. Aber auch die Wiedergabe von Messdaten, die während einer Testfahrt aufgezeichnet wurden, wird ein zentraler Bestandteil der Validierung sein. Zunächst muss die eigentliche Quelle der Tests oder, in Anlehnung an die Pegasus-Methode, die Szenarien, die ein Fahrzeug erfolgreich absolvieren muss, ermittelt werden. Im Prinzip handelt es sich dabei um Variationen einer relativ kleinen Anzahl von Vorlagen, den so genannten logischen Szenarien. So muss beispielsweise eine bestimmte Ausweichsituation im innerstädtischen Verkehr in einer Vielzahl von Varianten unter verschiedenen Bedingungen getestet werden, wobei die Grundsituation gleich bleibt, z. B. ein anderes Fahrzeug wechselt unerwartet die Fahrspur.
Sobald ein Basissatz von Szenarien verfügbar ist, dient er als Quelle für die Erstellung zahlreicher spezifischer Testfälle. Ausgehend von der Konfiguration eines logischen Szenarios erzeugt ein Algorithmus die endgültigen spezifischen Szenarien, die dann während der Simulation ausgeführt werden. Einfache Algorithmen setzen Permutationen, die gleichzeitige Einstellung einzelner Parameter oder stochastische Verfahren ein. Fortschrittlichere Algorithmen versuchen, kritische Szenarien durch Optimierungsmethoden oder künstliche Intelligenz zu identifizieren.
Ein weiterer Aspekt wird beim Testaufbau oft unterschätzt: Der gesamte Prozess muss automatisiert werden und gleichzeitig eine zentrale Konfiguration ermöglichen. Die Validierung der Zukunft wird sich nicht auf die Definition ausgeklügelter Testverfahren konzentrieren, sondern auf das Wesentliche, nämlich auf messbare Testfalleigenschaften. Diese Eigenschaften können aus den für die Simulation aufgezeichneten Messwerten berechnet werden.
Vorteil: Ihre Formulierung ist intuitiv, z. B. kann die relative Geschwindigkeit von zwei hintereinander fahrenden Fahrzeugen direkt aus den jeweiligen Geschwindigkeiten abgeleitet werden. Diese Eigenschaften werden während oder nach der Simulation berechnet, haben aber keinen Einfluss auf den eigentlichen Testprozess. Damit ist es möglich, im Closed-Loop-Betrieb immer einen festen Testablauf zu verwenden. Außerdem entfällt die Notwendigkeit der manuellen Definition von Testschritten.
Fazit
Die Entwicklung des autonomen Fahrens verändert die grundlegenden Modelle der Zusammenarbeit zwischen OEMs, klassischen Zulieferern und Plattformanbietern. Der Schwerpunkt liegt nicht mehr auf der Auslieferung eines fertigen Steuergeräts, sondern auf der Integration verteilter Fahrzeugfunktionen und deren frühzeitiger Validierung, möglicherweise auch unternehmensübergreifend. Das Grundprinzip lautet: Je früher Sie einen Fehler entdecken, desto billiger ist es, ihn zu korrigieren. Der Zugang zu gemeinsamen Simulations- und Testinfrastrukturen ermöglicht neue Formen der Zusammenarbeit, stellt aber letztlich nur eine der vielen Herausforderungen dieser Zusammenarbeit dar. Die Validierung der unzähligen Szenarien ist eine der zentralen Herausforderungen für das autonome Fahren. Daher basiert das szenariobasierte Testen bei dSPACE auf diesen drei Säulen. Sie berücksichtigen viele der vorgenannten Aspekte, die jedoch sehr komplex sein können. Da dSPACE sich als Komplettanbieter für die Validierung positioniert, bieten wir Lösungen in jedem dieser Bereiche an.
Mit unserer Toolkette können Sie die Validierung von Funktionen oder die Simulation von Steuergeräteverbunden mit nur wenigen Klicks abschließen und dabei eine hohe Testabdeckung und Szenariovariation sicherstellen. Außerdem können Sie den Entwicklern jederzeit ein schnelles Feedback zu ihrer Code-Qualität geben. Dadurch wird die Zahl der erforderlichen Testfahrer und Testfahrten auf ein überschaubares Maß reduziert.
dSPACE MAGAZIN, VERÖFFENTLICHT Januar 2020