Die Entwicklung autonomer Fahrzeuge bringt einen immensen Test- und Validierungsaufwand mit sich. Um dessen Komplexität und Kosten zu bewältigen, hat sich SERES für ein Testsystem von dSPACE entschieden, das frühzeitig und flexibel im Entwicklungsprozess einsetzbar ist – mit echten Sensoren im Regelkreis.
SilkRides und die AD-Strategie
Bei SilkRides handelt es sich um den Unternehmensbereich von SERES, der die Entwicklung von Technologien für das autonome Fahren (AD) verantwortet. Das SERES-Team besitzt eine Tradition als OEM mit Wurzeln im Silicon Valley, und bietet kostengünstige und offene Lösungen für Automobilhersteller. SilkRides wurde 2017 gegründet und beherrscht bereits das autonome Fahren der Stufen 3 und 4 in Stadt- und Autobahnszenarien.
SilkRides und das AD-Paket
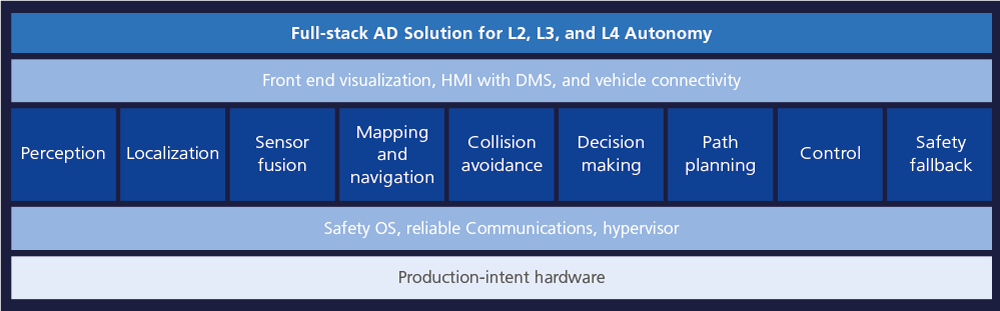
Das Team verfügt über sämtliche Fähigkeiten, die für die Entwicklung und Herstellung autonomer Fahrzeuge erforderlich sind. Dazu gehören Kompetenz in Perzeption, Planung und Steuerung – und zwar nicht nur für die Entwicklung, sondern auch für die Validierung dieser sicherheitsrelevanten Bereiche sowie Software-Over-the-Air-Updates, Hardware-Design etc. Eine Schlüsselkomponente ist das Domänensteuergerät, das teilweise künstliche Intelligenz nutzt. Es wertet die Sensordaten aus und bestimmt die Fahrstrategie. In einem ersten Schritt wird das Steuergerät als Prototyp implementiert, der anschließend sukzessive Weiterentwicklungen für die Serie durchläuft.
Herausforderung AD-Absicherung
Um per Validierung zu beweisen, dass ein System für autonomes Fahren in puncto Sicherheit einem durchschnittlichen menschlichen Fahrer ebenbürtig ist, wären Milliarden Kilometer an realen Testfahrten erforderlich. Darüber hinaus müsste auch jedes Update der Software strenge Tests durchlaufen. Die Ressourcen und die verfügbare Zeit bei SERES sind aber begrenzt, daher wären derart umfangreiche Fahrversuche unrealistisch. Um unseren Entwicklungs- und Validierungsprozess zu beschleunigen, möchten wir deswegen unsere Verifikations- und Validierungskette aus verschiedenen Simulationsstufen aufbauen. Auf diese Weise können dann für jedes Software-Release die Schlüsselszenarien und die seltenen Grenzfälle bereits vor den realen Fahrtests getestet werden.

dSPACE Radarprüfstand
Um die gesamte Wirkkette zu testen, bieten die dSPACE Radarprüfstände die Möglichkeit zur Over-the-Air-Stimulation des Radarsensors. Bei Bedarf lassen sich dabei auch Teile der Frontschürze mit einbeziehen. Auf diese Weise können alle Software- und Hardware-Schichten berücksichtigt werden, von der Erfassung des Signals vorne am Radar bis hin
zur Auswertung im Radarsteuergerät. Dieser sehr kompakte Prüfstand besteht im Wesentlichen aus einer Absorberkammer mit integrierten Sende- und Empfangsantennen, einem kalibrierten dSPACE Automotive Radar Test System (DARTS) und einem SCALEXIO HIL-Simulator. Für den Test wird der Radarsensor in der Kammer eingeschlossen und mit realistischen Radarechos stimuliert. Die kohärenten Echos ermöglichen es dem Radarsteuergerät, den Abstand, die Geschwindigkeit und den Radarquerschnitt der Radarobjekte zuverlässig zu ermitteln. Das Frontradar wird mit zwei DARTS 9030-M Units getestet. Als Eckradar installierte SERES eine DARTS 9030-MS Unit, deren Stärken in der Stimulation auf kurze Distanz liegen. Diese Konfiguration reicht aus, um alle relevanten Fahrsituationen zu testen.
SilkRides und die Testkette
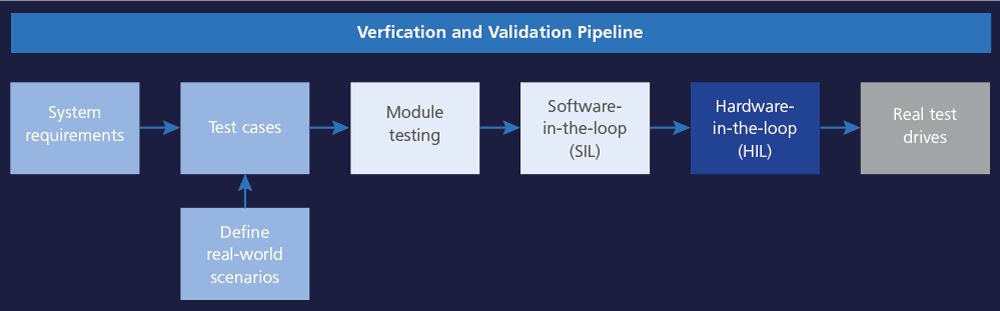
Vor der Installation in einem Testfahrzeug durchläuft jede Software-Version bei SilkRides mehrere Teststufen. Zunächst wird durch Unit-Tests und Modultests sichergestellt, dass sich die neuen Software-Komponenten genauso verhalten wie vorgesehen. Anschließend erfolgt die Integration der neuen Komponenten mit dem Rest der Entscheidungs- und Planungsmodule für den Software-in-the-Loop (SIL)-Test. Beim SIL-Test steuert die Software ein simuliertes Fahrzeug in relevanten Testfällen, um seine Gesamtleistung zu bewerten. Falls diese SIL-Tests erfolgreich verlaufen, wird das neue Software-Release auf der Domänen-Controller-Hardware für Hardware-in-the-Loop (HIL)-Tests kompiliert.
Der Prozess besitzt eine gewisse Datenkonsistenz für Testartefakte, wie beispielsweise virtuelle Fahrbahnen. Während des SIL- und HIL-Testprozesses lassen sich viele Probleme im Zusammenhang mit der Software und dem Zusammenspiel von Software und Hardware erkennen und beheben. Insgesamt reduziert sich dadurch bei den für die Software-Validierung notwendigen Fahrtests sowohl die Anzahl der erforderlichen Testfahrzeuge als auch die zurückzulegende Fahrstrecke.
Um zu beweisen, dass ein System für das autonome Fahren in puncto Sicherheit einem durchschnittlichen menschlichen Fahrer ebenbürtig ist, könnten Milliarden realer Kilometer für die Validierung erforderlich sein. Das dSPACE Testsystem in unserem Labor bietet eine effiziente Möglichkeit, reale Dinge auf virtuellen Straßen zu testen.
Anforderungen an HIL-Tests
Es gibt mehrere Schlüsselanforderungen, die eine HIL-Test-basierte Entwicklung von Funktionen für autonomes Fahren bei SilkRides erfüllen muss:
- Interne Integration von Software und Hardware:
Die HIL-Tests sollen die Möglichkeit bieten, die Software so früh wie möglich auf unserem Domänen-Controller zu testen. Alle Probleme, die durch die Integration von Embedded-Software oder den Echtzeitbetrieb auf der Hardware verursacht werden, sollen bereits vor den Tests im Fahrzeug identifizierbar und behebbar sein. - Integrationstests von Sensoren anderer Hersteller:
Mit Over-the-Air (OTA)-Radar- und Kameraprüfständen soll die Integration der realen Sensoren in den HIL-Testaufbau möglich sein. Probleme, die durch die Sensortreiber, das Kabel und den Sensor selbst verursacht werden, sollen mit Hilfe von HIL-Test behoben werden können. - Sichere Labortestplattform für Grenzfälle:
Weil das Testen von Grenzfällen und Hardware-Ausfällen auf der Straße Gefahren birgt und via SIL teilweise gar nicht realisierbar ist, soll der HIL-Aufbau die Möglichkeit bieten, diese potenziellen Gefahrensituationen sicher im Labor zu validieren. Lesen Sie dazu mehr im Abschnitt „Simulation von sicherheitskritischen Funktionen“.
Aufbau des Testsystems
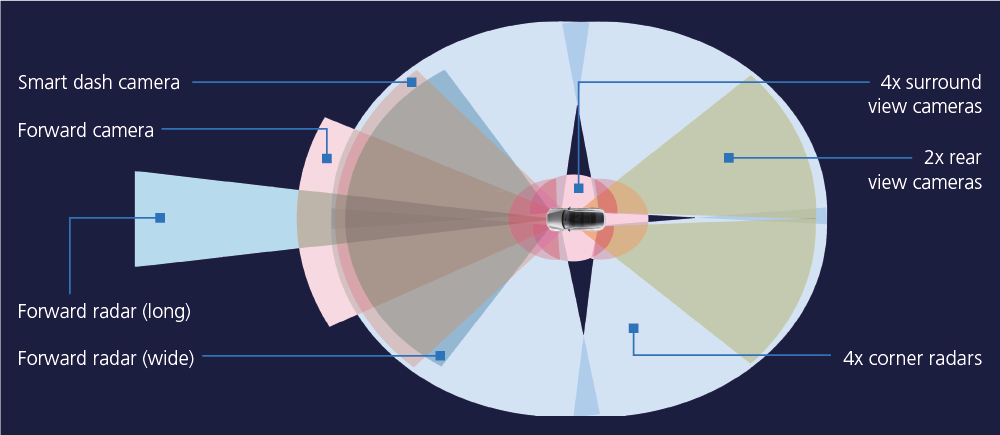
Um detaillierte und umfassende Labortests durchführen zu können, haben wir uns für einen flexiblen Aufbau entschieden, der das SilkRides-AD-Paket abdeckt. Gemeinsam mit dSPACE haben wir ein System aufgebaut, das Integrationstests von Sensoren, Reglern und Aktoren ermöglicht. Es besteht aus einem HIL-Simulator, der unsere Fahrzeuge realitätsnah abbildet, und wird durch vier synchronisierte Sensorprüfstände erweitert, die die realen Radare und Kameras in den Regelkreis integrieren. Durch die Möglichkeit, reale Komponenten zu verwenden, können wir die Leistung verschiedener Komponenten bereits in einer frühen Entwicklungsphase bewerten.
Der Radarprüfstand eröffnet uns die Möglichkeit, Radarsensoren frühzeitig zu bewerten und zu testen. Dies erleichtert die Entwicklung der Software für die Radarverarbeitung und das autonome Fahren erheblich.
Festlegung der Testanforderung
Wir begannen die Fahrversuche mit ASM Traffic, dem Verkehrssimulationsmodell der Toolsuite Automotive Simulation Models (ASM). Das Modell ermöglicht es uns, Fahrzeuge, Fußgänger, Verkehrszeichen usw. auf Straßen zu definieren, die aus HD-Karten importiert wurden. Darüber hinaus unterstützt ASM Traffic die Erstellung von Testszenarien für die Assistenzfunktionen unserer Fahrzeuge wie ACC, Spurhaltung, Überholassistenten etc. Die gesamte Testautomatisierung wird von AutomationDesk gesteuert und bietet zusätzliche Testoptionen wie Signalmanipulation und Testberichterstattung.
Closed-Loop Testing
Die simulierte Welt wird in die Sensorprüfstände eingespeist, um die Radar- und Kamerasensoren zu stimulieren. Die Sensorsignale sind dabei die Eingabedaten für das zu testende Gerät, in dem Fall unser Controller, auf dem die entwickelte AD-Software mit Perzeptions- und Sensorfusionsalgorithmen läuft. Auf diese Weise werden die kompletten AD-Komponenten integriert und deren tatsächliches Verhalten berücksichtigt. Jeder virtuelle Fahrversuch kann durch eine 3D-Animation in Echtzeit überwacht werden.

dSPACE Kamerabox
Um die Sensoreigenschaften einer Kamera zu testen, ermöglicht die dSPACE Kamerabox die Over-the-Air-Stimulation des Imager-Chips der Kamera. Zu diesem Zweck besitzt die Box einen Monitor, der die simulierte Sensorumgebung zeigt, zum Beispiel ein Verkehrsszenario mit mehreren Fahrzeugen, Fußgängern, Randbebauungen usw. Die Kamera verarbeitet dann die stimulierten Daten weiter. Um zusätzliche Lichtquellen und Blendung zu minimieren, ist alles in einer geschlossenen Kammer installiert.
Testmöglichkeiten und -ergebnisse
Das Testsystem basiert auf dem HIL-Simulator und den Prüfständen und bietet verschiedene Möglichkeiten, die zu einer hervorragenden Testabdeckung führen. Zudem ermöglicht es schnelle Auswertungen unter identischen Bedingungen. Die nachfolgend durchgeführten Auswertungen und Tests zeigen, was SERES bisher erreicht hat:
Flexible Sensorintegration
Weil sich der Bereich des autonomen Fahrens sehr dynamisch entwickelt, sind Investitionen in anpassungsfähige Systeme von entscheidender Bedeutung. Aus diesem Grund haben wir uns für die Over-the-Air-Radar- und -Kameraprüfstände von dSPACE entschieden, denn ihre Stärken liegen unter anderem in der Flexibilität bei der Einbindung neuer Sensortypen und Sensorkonfigurationen. Der Over-the-Air-Ansatz macht es dabei besonders einfach, Plausibilitätsprüfungen durchzuführen. Denn das Verhalten der Sensoren (komplettes Steuergerät einschließlich der Signalverarbeitungssoftware) muss unter definierten Bedingungen bekannt sein – und das insbesondere in Grenzfällen. Die Situationen, in denen Objekte von einem Sensor erkannt oder nicht erkannt werden, sind von größter Bedeutung für die Entwicklung der signalverarbeitenden Software.
Sensor-Benchmarking mit Radarkammer
SilkRides setzt bei Radarsensoren auf Tier-1-Lieferanten aus der Automobilindustrie, weshalb ein genauer Leistungsvergleich der Sensoren eine der wichtigsten Aufgaben ist, die es bei der Auswahl des Lieferanten zu berücksichtigen gilt. Für Radar-Leistungstests im realen Fahrzeug ist in der Regel ein weitläufiges Testgelände erforderlich, auf dem sich das Host-Fahrzeug und das Zielfahrzeug zudem gleichzeitig mit den eingebauten Ground-Truth-Geräten bewegen müssen. Mit dem Closed-Loop-Radarprüfstand können viele dieser Tests stattdessen im Labor stattfinden, was zu eindeutigen und konsistenten Ergebnissen führt. Dazu trägt das dSPACE Automotive Radar Test System (DARTS) bei, das in jedem Radarprüfstand installiert ist. Es erzeugt mit Hilfe beweglicher Antennen reale Over-the-Air-Radarechos, mit denen sich die Eigenschaften eines Sensors äußerst genau bestimmen lassen.

Skalierbar für zukünftige Anwendungen
Unser HIL-Aufbau mit einer Kamera, einem Frontradar und zwei Eckradaren reicht aus, um die meisten Funktionen bei Autobahnfahrten zu simulieren, denn die Eckradare lassen sich so konfigurieren, dass sie sich entweder an der Vorderseite, seitlich oder am Heck des Fahrzeugs befinden. In einem weiteren Schritt kann die SCALEXIO-Plattform um zusätzliche Kamera-, Radar-, Lidar- und Ultraschallsensoren sowie GNSS-Simulatoren erweitert werden. Der flexible Systemaufbau erlaubt sowohl Hardware- als auch Software-Erweiterungen. So unterstützt das System beispielsweise die Integration eines Lidar-Modells aus der Werkzeugkette für dSPACE Sensor Simulation, das den kompletten Lidar-Übertragungskanal einschließlich der 3D-Umgebung simuliert.
Simulation von sicherheitskritischen Funktionen
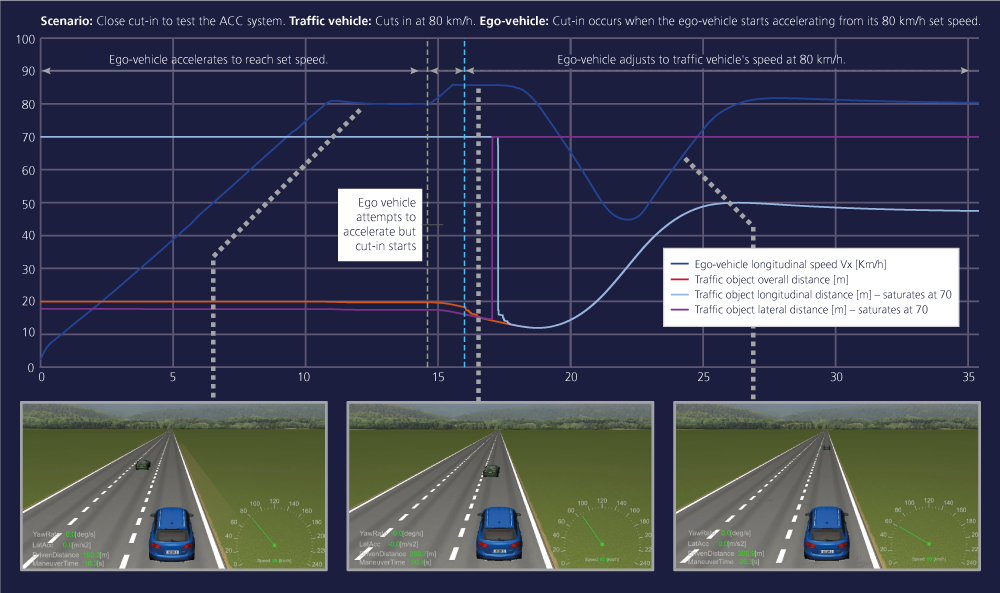
Bei der Entwicklung von Systemen für das autonome Fahren auf SAE Level 3 oder höher gilt es zu beachten, dass viele Komponenten dieser Systeme in jeder Situation ausfallsicher sein müssen. Die Bedingungen, unter denen dies getestet werden kann, sind mit einem Fahrzeug nur schwierig und manchmal auch nur unter Gefahren zu reproduzieren. Der HIL-Test dagegen macht es möglich, sowohl das Umschalten von der Primärfunktion auf die Backup-Funktion im Fehlerfall als auch sichere Anhaltemanöver bei verschiedenen Straßenverhältnissen zu simulieren.
Automatische Regressionstests
dSPACE Werkzeuge wie AutomationDesk ermöglichen es, die Prüfstände beim Start automatisch einzurichten und so die manuellen Eingaben deutlich zu reduzieren. Darüber hinaus können viele unserer Tests automatisch ablaufen, so dass bei einem neuen Software-Release oder einer Hardware-Modifikation ein definierter Satz von Testfällen systematisch ausgewertet werden kann.
Szenariogenerierung mit HD Maps: Bay Bridge
Bei den von SilkRides durchgeführten Autobahnfahrten kamen Karten von Drittanbietern zum Einsatz, und zwar für das Spurhalten, beim Spurwechsel und bei der Routenführung. Die Integration zwischen dem dSPACE ASM- und HD-Map-Import gewährleistet eine hochpräzise Simulationsumgebung und realitätsnahes Testen. In der San Francisco Bay ergeben sich durch die Ein- und Ausfahrten der Bay Bridge viele anspruchsvolle Szenarien. Wir haben die Karte der Bay Bridge in ASM importiert und viele dieser kniffligen Testfälle in unserem HIL-Testaufbau nachgestellt.
Zusammenfassung und Ausblick
Das dSPACE Testsystem eröffnet einzigartige Möglichkeiten, Sensoren und Controller in ein virtuelles Fahrzeug zu integrieren und zusammen zu testen. Der Einsatz dieser äußerst realistischen Testumgebung erlaubt bereits in frühen Entwicklungsphasen aussagekräftige Einblicke in die Leistungsfähigkeit der Hardware- und Software-Komponenten. Dies beschleunigt den Entwicklungsprozess, da wegweisende Entscheidungen frühzeitig getroffen werden können. Weil Testfälle einfach wiederverwendet werden können, lassen sich Regressionstests durchführen, um die Fehlerbeseitigung zuverlässig abzusichern. Neue Anforderungen können durch den Ausbau des flexiblen Testsystems und der Testbibliotheken erfüllt werden. Wir freuen uns darauf, neue Fahrzeuge auf die Straße zu bringen, die durch ein robustes und zuverlässiges Testsystem validiert wurden.
Über die Autoren
Ziqi Zhu
Ziqi Zhu leitet das Team für intelligentes Fahren bei SERES in Santa Clara, CA, USA

Hala Al-Khalil
Hala Al-Khalil ist Simulationsingenieurin im Team für intelligentes Fahren bei SERES in Santa Clara, CA, USA.
Samuel Rayseldi
Samuel Rayseldi ist Systemingenieur im Team für intelligentes Fahren bei SERES in Santa Clara, CA, USA



