Validierung von Perzeptions- und Sensorfusions-Softwarefunktionen sowie von virtuellen Steuergeräten mit Data-Replay-Tests

- Testen von Sensorfusion und Perzeptionskomponenten mit aufgezeichneten Daten aus der realen Welt
- Leistungsstarke, Cloud-fähige Lösung mit Linux-Docker-Containern
- Flexible Integration in eine Vielzahl von Frameworks (ROS, ADTF, AUTOSAR etc.)
- Interoperable SUT (System under Test)-Schnittstellen für Closed-Loop- und Data-Replay-Tests
Aufgabe
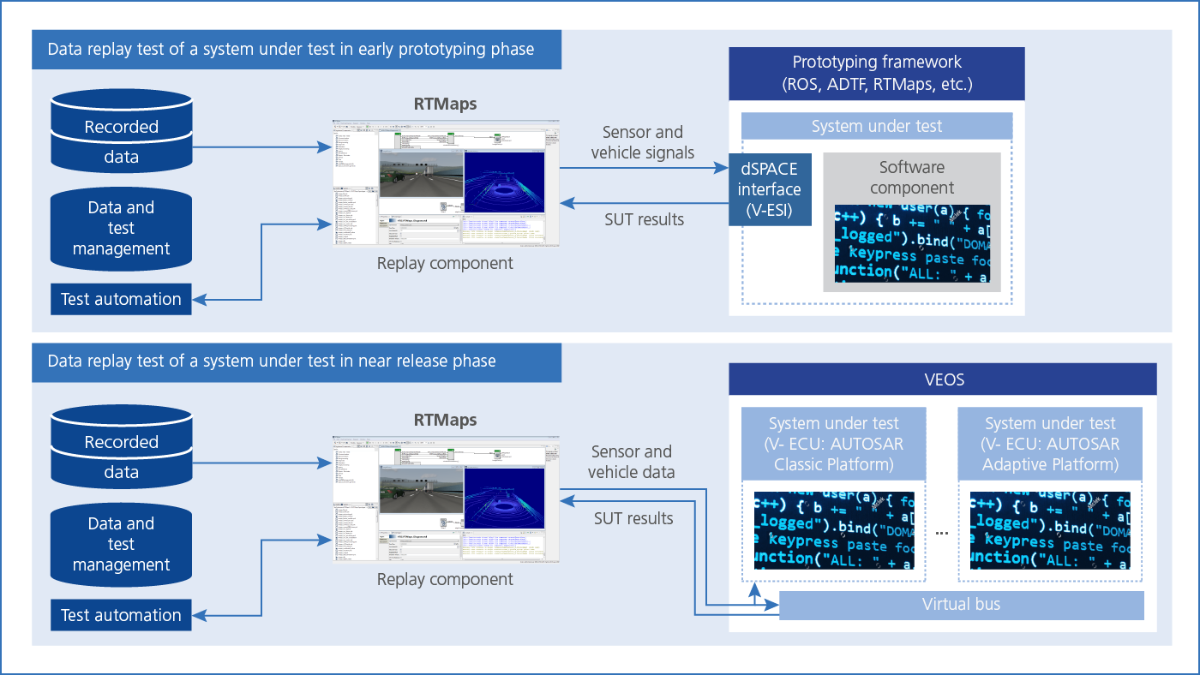
Das Benchmarking verschiedener Anbieter, die Validierung der Funktionen von Perzeptionssoftware und Regressionstests sind Aufgaben, die effizient und in großem Umfang über die einzelnen Software-Entwicklungsphasen hinweg durchgeführt werden müssen. Ob in der frühen Software-Entwicklungsphase, in der Multisensor-Entwicklungsframeworks wie ROS und RTMaps eingesetzt werden, oder in späteren Phasen, in denen ein serienreifes virtuelles Steuergerät auf Basis von AUTOSAR implementiert wird – entscheidend ist eine deterministische Datenwiedergabe-Lösung für die Fehleranalyse, das Debugging und den Test von Software-Komponenten für die Umgebungsperzeption und Sensorfusion.
Herausforderung
Die Anpassung der aufgezeichneten Daten an die Schnittstellen des zu testenden Systems (SUT), die realistische Simulation des SUT in all seinen Phasen mit allen entsprechenden Software-Stack-Schichten und die deterministische Dateneinspeisung in das SUT aus heterogenen Datenquellen und Datenströmen sind Herausforderungen, die eine robuste Softwarelösung zur Datenwiedergabe (SIL) meistern muss. Gleichzeitig muss eine hohe Modularität, Skalierbarkeit und Effizienz bei der CPU/GPU-Ressourcennutzung gewährleistet sein.
Lösung
Die Skalierbarkeit der Testausführung und die Fähigkeit, Tausende von Testinstanzen durchzuführen, ist ein enormer Vorteil, der durch den Einsatz der dSPACE Software-Lösungen zur Datenwiedergabe erreicht werden kann. Alle verwendeten Komponenten sind Linux-Docker-Container, die eine hohe Leistung und einfache Skalierbarkeit in jedem Cloud-basierten Test-Framework ermöglichen.
RTMaps, das Entwicklungsframework für Multisensoranwendungen von Intempora, unterstützt neben umfassenden 2D- und 3D-Visualisierungsfunktionen auch die synchrone Wiedergabe aufgezeichneter Datenströme in einer Vielzahl von Dateiformaten wie MDF4, Rosbags, DAT-Dateien usw. Dies ist für die Fehlersuche und Fehleranalyse von Vorteil.
RTMaps kann die Daten in einem „So schnell wie möglich“-Modus wiedergeben, um eine Ausführung zu gewährleisten, die ohne Datenverlust und mit hoher Performance schneller als in Echtzeit ist. VEOS, die Integrations- und Simulationsplattform von dSPACE, unterstützt alle relevanten Standards für die virtuelle Steuergerätesimulation, zum Beispiel AUTOSAR Adaptive und Classic. Darüber hinaus unterstützt VEOS die realistische Simulation von Bussen wie CAN/CAN FD und Ethernet, was ein hochgenaues Testen des gesamten Software-Stacks einschließlich der Sicherheitsfunktionen vor dem Zieleinsatz ermöglicht.
Jede SUT (System under Test)-Schnittstelle für interoperabel für Closed-Loop- und Data-Replay-Tests. Ein nahtloser Übergang zwischen der Software-Lösung für die Datenwiedergabe (SIL) und der Hardware-Lösung (HIL) ist ebenfalls gewährleistet, da alle Schnittstellen und Software-Komponenten auf den Software- (VEOS) und Hardware-Plattformen (SCALEXIO) wiederverwendbar sind.
Treiben Sie Innovationen voran. Immer am Puls der Technologieentwicklung.
Abonnieren Sie unser Expertenwissen. Lernen Sie von erfolgreichen Projektbeispielen. Bleiben Sie auf dem neuesten Stand der Simulation und Validierung. Jetzt dSPACE direct und dSPACE direct aeropace & defense abonnieren.