Le véhicule à capteurs dSPACE comme exemple de travail avec le développement orienté données
Ces dernières années, le développement orienté données est devenu l'une des méthodes de développement logiciel les plus importantes dans divers secteurs. L’industrie automobile mène la course en se concentrant sur la résolution du problème de la voiture autonome, où les données de haute qualité jouent un rôle clé. Pour développer davantage ses outils et offrir des fonctionnalités de pointe à l’industrie automobile, dSPACE a créé un écosystème de collecte de données de haute qualité. Pour ce faire, la société utilise son propre véhicule à capteurs, développé spécifiquement à cette fin.
Le véhicule à capteurs dSPACE
En tant que composant clé de l'écosystème susmentionné, le véhicule à capteurs dSPACE est équipé des capteurs suivants :
• Un Velodyne Alpha Prime LiDAR haute résolution doté de 128 canaux.
• 9 caméras avec vision périphérique et stéréo d’une résolution de 2880 x 1860 pixels.
• Un radar UHD 4D.
• Un capteur GPS haute précision pour la localisation avec une précision de quelques centimètres.
Ensemble, les capteurs génèrent environ 10 To de données par heure. L'enregistreur de données dSPACE AUTERA Autobox situé dans le coffre de toit enregistre toutes les données des capteurs et les écrit sur le SSD à un débit d’environ 23 Gbit/s. L’acquisition des données de capteurs et la gestion du système sont assurées par le logiciel middleware RTMaps, qui effectue des tâches telles que la synchronisation de tous les équipements, la gestion des processus du système et l’enregistrement des données.
Toutefois, avant que la collecte de données puisse commencer sur la route, des prérequis, tels que la calibration des capteurs, sont nécessaires pour permettre certains processus le long du pipeline de développement orienté données qui suit la collecte de données.
Calibration des capteurs : Le pourquoi et le comment
Qu’est-ce que la calibration des capteurs ? En général, la calibration des capteurs fait référence au processus de mesure de la correspondance entre la sortie d’un capteur et les données réellement mesurées par le capteur. Toutefois, dans le cadre de l’acquisition de données avec une configuration de capteurs, le terme calibration de capteurs fait référence à la calibration géométrique des capteurs. En général, il y a deux types de calibration : intrinsèque et extrinsèque.
La calibration intrinsèque fait référence à la calibration des capteurs par rapport à eux-mêmes pour obtenir une correspondance géométrique entre les données mesurées et les données réelles. La calibration intrinsèque de la caméra, également appelé redécoupage de la caméra, consiste à estimer les paramètres des capteurs d'objectif et d’image, par exemple. Les paramètres estimés peuvent être utilisés pour supprimer la distorsion d’image causée par l’objectif.
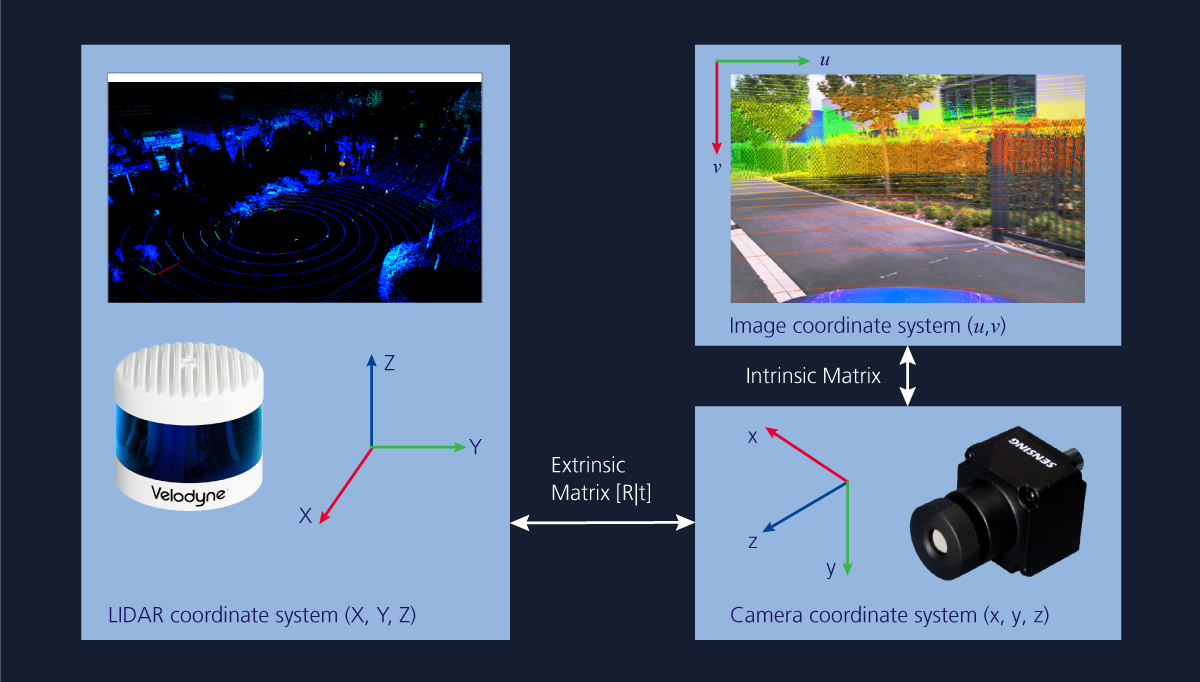
La calibration extrinsèque fait référence à la calibration d’un capteur par rapport à un autre, entraînant une correspondance géométrique entre les données mesurées par un capteur et celles mesurées par un autre capteur. Par exemple, dans une configuration de capteurs avec un LiDAR et une caméra, la calibration extrinsèque consiste à estimer les paramètres qui définissent les positions relatives des capteurs et qui peuvent être utilisés pour transmettre les données de mesure du LiDAR à la caméra dans la configuration.
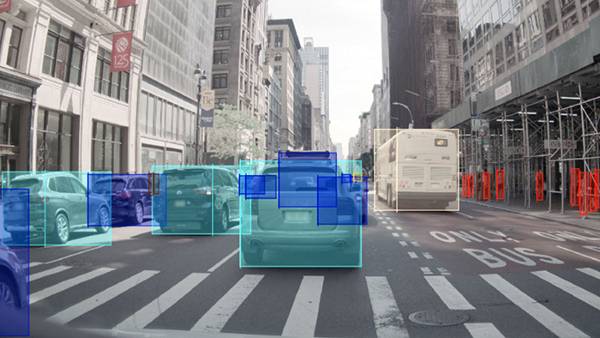
Pourquoi avons-nous besoin de calibrer les capteurs ? La calibration vérifie généralement la précision et la reproductibilité des capteurs. La calibration géométrique est nécessaire pour transférer les informations d’un capteur à un autre. La calibration des différents capteurs les uns par rapport aux autres est nécessaire pour le fonctionnement d’un véhicule autonome afin qu’il puisse coordonner les informations reçues de plusieurs capteurs. Par exemple, de nombreux algorithmes de détection d’objets 3D combinent des images de caméra avec des données de nuages de points LiDAR pour améliorer les performances de détection d’objets. En outre, les objets dans le nuage de points LiDAR 3D peuvent être étiquetés avec précision pour générer des étiquettes de boîte de délimitation 3D qui peuvent être facilement appliquées aux images 2D d'une ou plusieurs caméras, pour entraîner des réseaux neuronaux à la reconnaissance d'objets. Cela nécessite une calibration intrinsèque et extrinsèque de la caméra par rapport au LiDAR.
Comment calibrer les capteurs
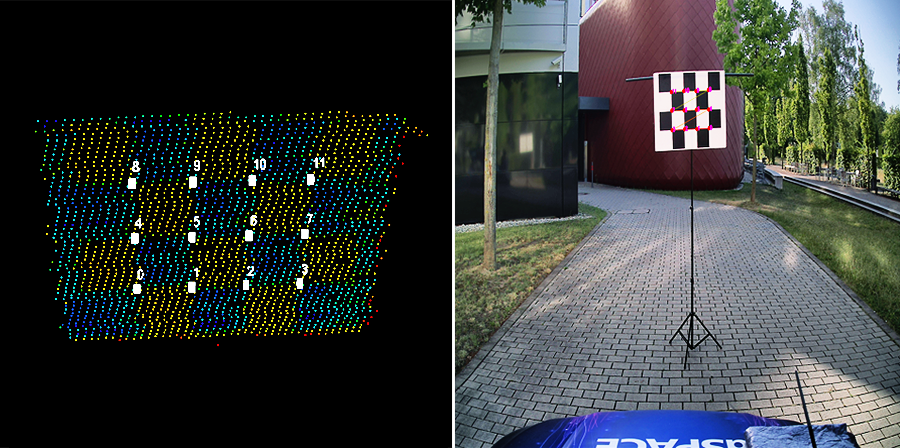
L’exemple le plus courant de calibration de capteurs pour les applications de conduite autonome est la calibration de la caméra et du capteur LiDAR. Tout d’abord, une calibration intrinsèque de la caméra doit être effectuée. La méthode classique pour réaliser une calibration intrinsèque de caméra consiste à utiliser une cible de damier plane pour calculer la matrice de caméra et les paramètres de distorsion. Les points ou coins clés du damier sont détectés dans l’image. Ensuite, les paramètres sont calculés en comparant les points clés détectés dans l'image avec les points clés réels connus sur le damier. Pour améliorer la précision et la robustesse de la calibration, certaines approches heuristiques sont utilisées pour s'assurer que les détections de points clés sont acquises avec différentes positions de cible et suffisamment d'échantillons par position de cible. Les paramètres intrinsèques calculés sont également utilisés pour le processus de calibration extrinsèque.
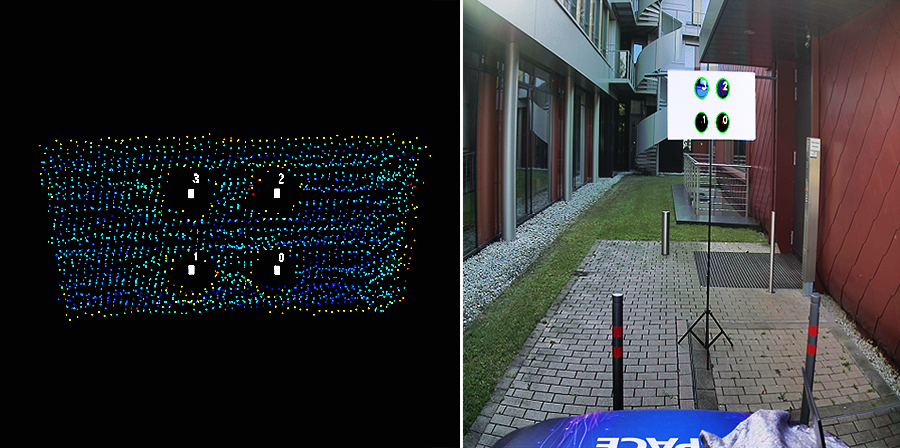
Pour la calibration extrinsèque, les points clés doivent être détectés à la fois dans les images de la caméra et dans les données de nuages de points LiDAR. La quantité de données de nuages de points LiDAR étant faible par rapport à la quantité de données images, la détection de points clés sur les cibles de calibration devient difficile. La qualité de la calibration dépend de la précision de la détection des points clés dans les deux types de données de capteurs. Pour étudier la précision de calibration de la configuration de capteurs, plusieurs cibles de calibration peuvent être utilisées pour mesurer la performance de calibration. La méthode classique consiste à utiliser une cible de damier plane pour la détection des points clés. Cependant, de nouvelles méthodes de pointe proposent l'utilisation d'une cible 3D à trous circulaires, qui est également adaptée à la détection de points clés en présence de nuages de points épars.
L'heuristique garantit que seules des détections précises des points clés sont conservées pour obtenir une calibration robuste. Les points clés détectés dans le système de coordonnées de la caméra sont comparés aux points clés correspondants dans le système de coordonnées LiDAR pour calculer les paramètres de calibration extrinsèque qui définissent la translation et la rotation des systèmes de coordonnées les uns par rapport aux autres. Les algorithmes de calibration intrinsèque et extrinsèque intégrés dans le logiciel RTMaps enregistrent en temps réel des détections de points clés de haute qualité et évaluent les performances de l'algorithme de calibration.
Grâce au LiDAR haute résolution, les deux méthodes atteignent une grande précision avec une erreur de reprojection dans la plage de 1 ± 0,1 pixel pour la calibration extrinsèque. La calibration basée sur le damier converge plus rapidement que la calibration basée sur la cible 3D pour la configuration de capteurs parce que le damier utilisé contient trois fois plus de points clés que la cible 3D. Les paramètres de calibration calculés peuvent être utilisés pour fusionner les données RGB de l’image avec les données de nuages de points LiDAR ou les informations de profondeur des données de nuages de points LiDAR avec l’image.
Une vision exhaustive
La vidéo montre clairement comment la caméra du véhicule à capteurs dSPACE et le LiDAR capturent l'environnement en parallèle.